سیستم نقشهبرداری جارو رباتیک چگونه کار میکند؟ از اسکن خانه تا ذخیره نقشه

سیستم نقشهبرداری جارو رباتیک چیست و چرا اهمیت دارد؟
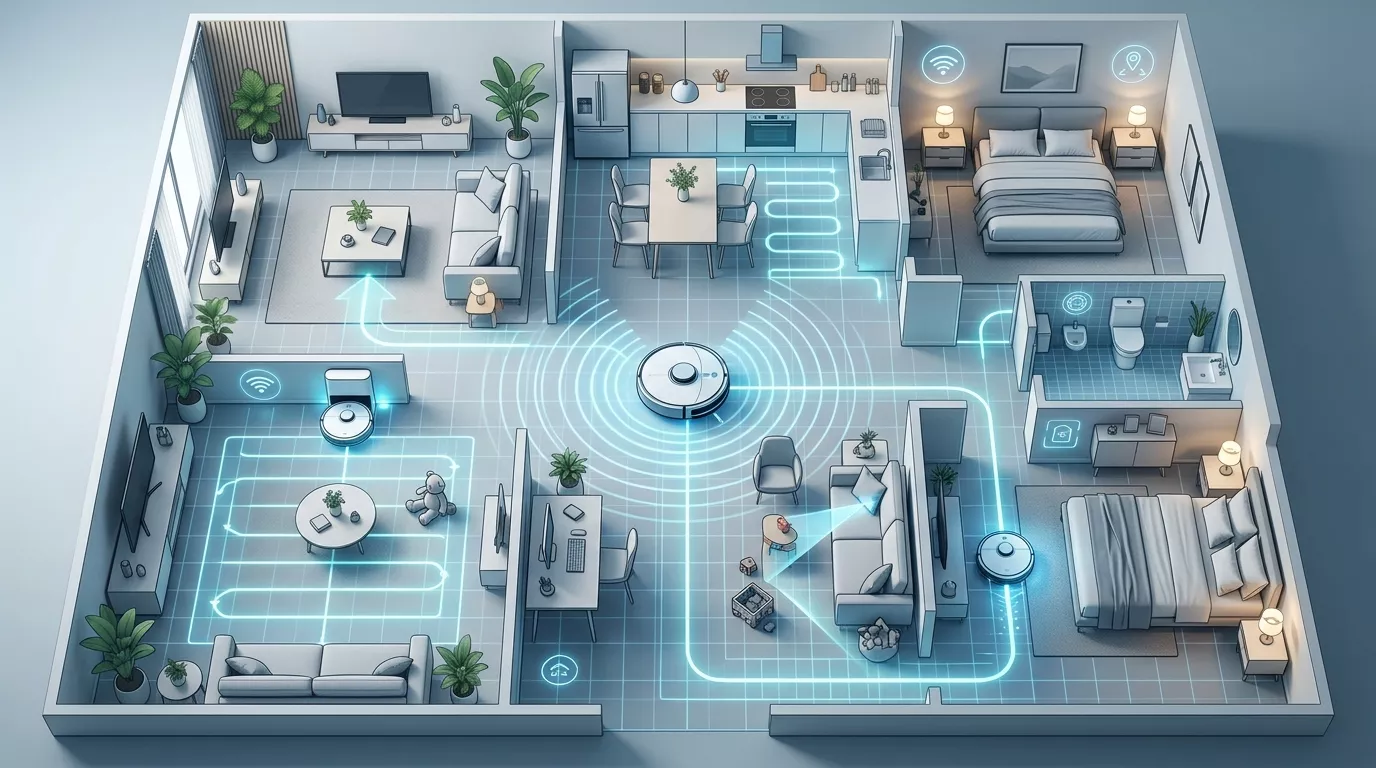
در مدلهای جدید جارو رباتیک، دستگاه فقط بهصورت تصادفی روی زمین حرکت نمیکند، بلکه ابتدا محیط را اسکن کرده و یک نقشه دیجیتال از خانه ایجاد میکند. این قابلیت که با عنوان سیستم نقشه برداری جارو رباتیک شناخته میشود، به ربات کمک میکند موقعیت اتاقها، دیوارها، مبلمان و مسیرهای عبور را تشخیص دهد و بر اساس آن، برنامه تمیزکاری منظمتری داشته باشد.
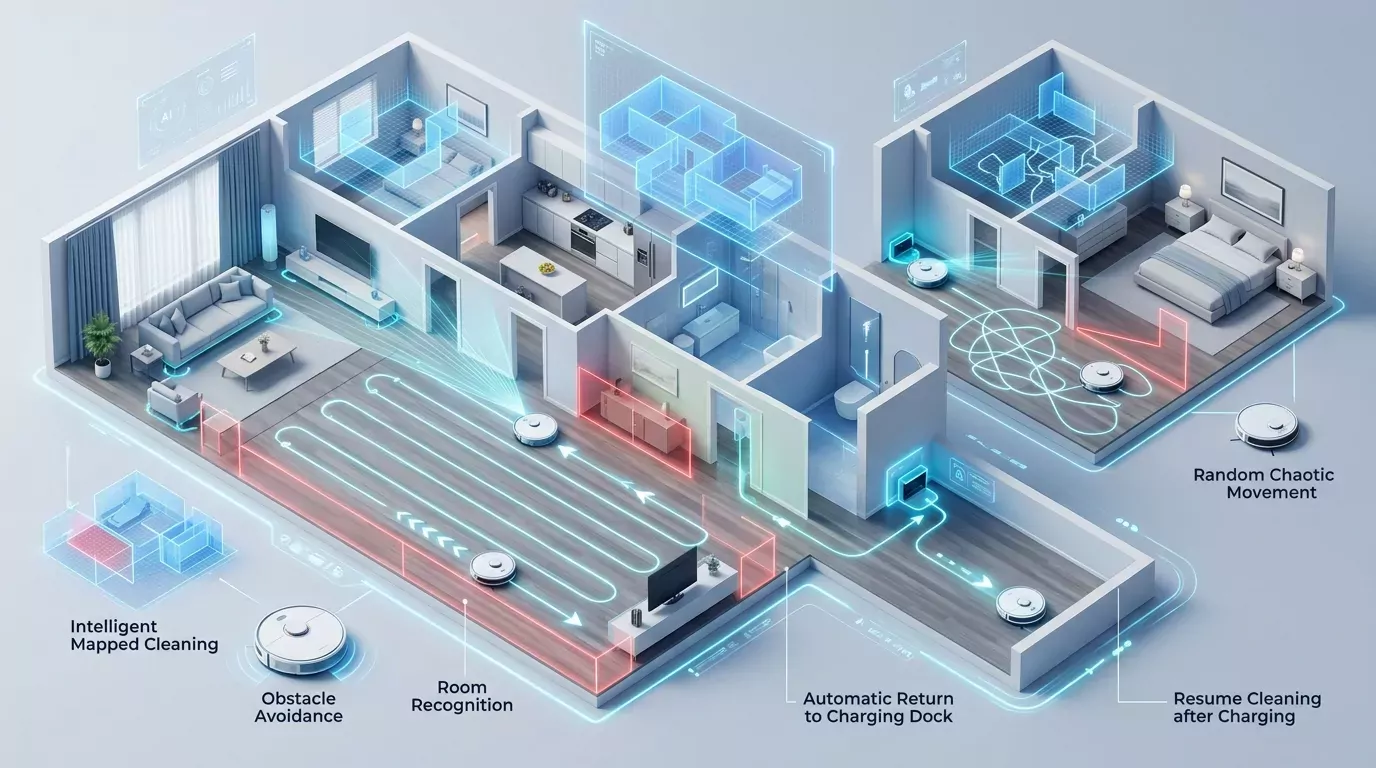
در گذشته بسیاری از جاروهای رباتیک با الگوی حرکتی Random کار میکردند؛ یعنی بدون شناخت واقعی از محیط، مدام تغییر مسیر میدادند و احتمال داشت بعضی قسمتها چند بار تمیز شوند یا برخی نقاط اصلاً پوشش داده نشوند. اما در جارو رباتیکهای دارای سیستم نقشهبرداری، حرکت دستگاه بر اساس تحلیل محیط انجام میشود و همین موضوع دقت نظافت را بهطور محسوسی افزایش میدهد.
امروزه برندهایی مثل شیائومی، Roborock، Dreame، Ecovacs و iRobot از فناوریهای پیشرفتهای مانند LiDAR، LDS و Visual SLAM استفاده میکنند تا تجربهای هوشمندتر، دقیقتر و کارآمدتر را برای کاربران فراهم کنند. به همین دلیل هنگام خرید جارو رباتیک، نوع سیستم مسیریابی، دقت نقشهبرداری و عملکرد ناوبری دستگاه به یکی از مهمترین معیارهای انتخاب و خرید جارو روباتیک هوشمند تبدیل شده است.
نقشهبرداری جارو رباتیک چگونه باعث تمیزکاری هوشمند میشود؟
مهمترین تفاوت جاروهای هوشمند با مدلهای قدیمی در این است که دستگاه محیط را «میشناسد». در فرآیند نقشه برداری جارو رباتیک، ربات متوجه میشود هر اتاق کجا قرار دارد، چه بخشهایی قبلاً تمیز شدهاند و کدام نواحی هنوز باقی ماندهاند. همین موضوع باعث میشود حرکت دستگاه هدفمند، منظم و قابل پیشبینی باشد.
وقتی ربات نقشه دقیقی از خانه داشته باشد، میتواند بهجای حرکتهای تکراری یا تصادفی، مسیرهای خطی و بهینه انتخاب کند. نتیجه این موضوع کاهش زمان نظافت، پوشش کاملتر فضا و جلوگیری از برخوردهای مکرر با مبلمان است. علاوه بر این، کاربر میتواند در اپلیکیشن اتاقها را تفکیک کند، مناطق ممنوعه تعریف کند یا فقط یک بخش خاص را برای تمیزکاری انتخاب کند.
تفاوت جارو رباتیک با سیستم نقشهبرداری و مدلهای بدون نقشه
اگر این سؤال مطرح شود که جارو رباتیک چگونه نقشه میکشد، پاسخ به نوع فناوری و سنسورهای دستگاه بستگی دارد. مدلهای پیشرفته با استفاده از لیزر، دوربین یا سنسورهای فاصله، محیط را تحلیل میکنند و نقشهای قابل استفاده برای مسیریابی میسازند. اما مدلهای بدون نقشه فقط به سنسور برخورد یا تشخیص مانع متکی هستند و شناخت واقعی از محیط ندارند.
به همین دلیل جاروهای Random معمولاً قیمت پایینتری دارند و برای فضاهای کوچک یا استفاده سبک مناسبتر هستند. در مقابل، مدلهای هوشمند عملکرد دقیقتری ارائه میدهند و مخصوص خانههای بزرگ، چنداتاقه یا محیطهایی با چیدمان پیچیده طراحی شدهاند. بسیاری از جارو رباتیک شیائومی با قابلیت نقشهبرداری امکان ذخیره چند نقشه، تشخیص اتاق و مدیریت حرفهای مسیر را نیز در اختیار کاربر قرار میدهند.
ارتباط سیستم نقشهبرداری با مصرف باتری و سرعت نظافت
یکی از مهمترین مزایای «سیستم مسیریابی جارو رباتیک» کاهش حرکتهای اضافه است. وقتی دستگاه بداند دقیقاً کجا قرار دارد و چه بخشهایی باقی ماندهاند، دیگر نیازی به تکرار بیدلیل مسیرها نخواهد داشت. همین موضوع باعث میشود انرژی کمتری مصرف شود و ربات بتواند با یکبار شارژ، مساحت بیشتری را پوشش دهد.
در مدلهای مجهز به فناوریهای پیشرفتهتر، حتی بازگشت به داک شارژ نیز هوشمندانه انجام میشود. دستگاه پس از شارژ مجدد، دقیقاً از همان نقطهای که کار متوقف شده ادامه میدهد. این ویژگی بهخصوص در خانههای بزرگ اهمیت زیادی دارد و تجربه استفاده از فناوری نقشهبرداری جارو رباتیک را نسبت به مدلهای سنتی کاملاً متفاوت میکند.
جارو رباتیک چگونه نقشه میکشد؟ مراحل کامل نقشهبرداری در خانه
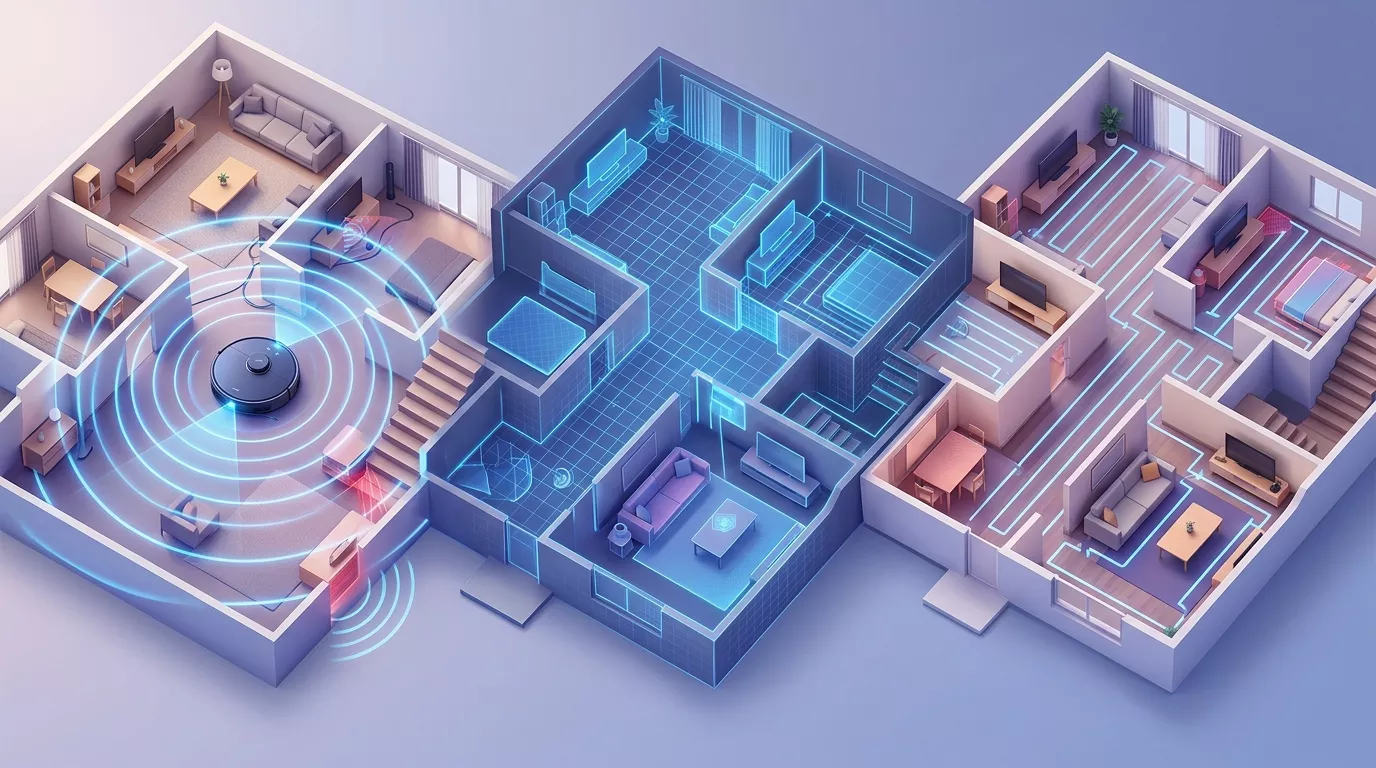
فرآیند اینکه جارو رباتیک چگونه نقشه میکشد ترکیبی از اسکن محیط، تحلیل دادههای سنسورها و تصمیمگیری لحظهای است. وقتی دستگاه برای اولینبار وارد محیط میشود، ابتدا یک اسکن اولیه انجام میدهد تا ابعاد خانه، موقعیت دیوارها، مبلمان و مسیرهای قابل عبور را تشخیص دهد. در مدلهای پیشرفته، این کار توسط سنسور LiDAR یا سیستم LDS انجام میشود؛ به همین دلیل معمولاً دقت «جارو رباتیک دارای LiDAR» بیشتر از مدلهای سادهتر است. اسکن اولیه اهمیت زیادی دارد، چون ربات در همین مرحله مرز اتاقها و نقاط کور را شناسایی میکند و پایه اصلی نقشه دیجیتال را میسازد.
بعد از جمعآوری دادههای محیط، الگوریتمهای SLAM اطلاعات را پردازش میکنند تا موقعیت دقیق ربات در خانه مشخص شود. دستگاه سپس با بررسی موانع، مسیرهای رفتوآمد، نواحی پرتردد و محل فرشها، بهینهترین مسیر حرکت را تعیین میکند. در نهایت نقشه ایجادشده در حافظه ذخیره میشود تا در دفعات بعدی نیازی به اسکن کامل محیط نباشد. این قابلیت که در مدلهای مجهز به LDS و بسیاری از دستگاههای پیشرفته دیده میشود، یکی از دلایلی است که کاربران هنگام خرید جارو رباتیک شیائومی به سراغ این محصولات میروند؛ زیرا باعث میشود فرآیند نظافت سریعتر، دقیقتر و با مصرف باتری کمتر انجام شود.
اسکن اولیه محیط توسط سنسورها
اولین مرحله در فناوری نقشهبرداری جارو رباتیک اسکن محیط است. ربات هنگام حرکت، با استفاده از اسکن لیزری، حسگر مادونقرمز، سنسور برخورد و سنسور پرتگاه، اطلاعات محیط را جمعآوری میکند. در مدلهای حرفهای، برجک LiDAR صدها بار در ثانیه فاصله اجسام را اندازهگیری میکند تا موقعیت دیوارها، پایه مبل، میز و حتی مسیرهای باریک مشخص شود. اگر خانه نور کم داشته باشد یا اجسام براق و آینهای وجود داشته باشند، دقت اسکن ممکن است کاهش پیدا کند؛ به همین دلیل کیفیت سنسورها نقش مهمی در دقت نهایی نقشه دارد.
در این مرحله، ربات هنوز نقشه کاملی از خانه ندارد و صرفاً در حال ساخت یک مدل اولیه است. ژیروسکوپ و شتابسنج کمک میکنند دستگاه متوجه شود چقدر حرکت کرده و در چه جهتی قرار دارد. اگر جارو هنگام اسکن اولیه بهدرستی محیط را پوشش ندهد، احتمال ایجاد خطای نقشهبرداری یا تقسیم اشتباه اتاقها بیشتر میشود. به همین دلیل معمولاً توصیه میشود در اولین اجرای دستگاه، موانع اضافی و کابلهای رهاشده از مسیر جمع شوند.
پردازش دادهها و ساخت نقشه دیجیتال خانه
بعد از پایان اسکن، مرحله تحلیل دادهها در سیستم نقشه برداری جارو رباتیک آغاز میشود. پردازنده دستگاه دادههای دریافتی از سنسورها را ترکیب میکند تا یک نقشه دیجیتال از محیط بسازد. الگوریتم SLAM در این بخش نقش کلیدی دارد؛ چون ربات باید همزمان هم موقعیت خودش را تشخیص دهد و هم محیط اطراف را مدلسازی کند. این کار از نظر محاسباتی پیچیده است، زیرا کوچکترین خطا در تخمین موقعیت میتواند باعث انحراف تدریجی نقشه شود.
در جاروهای مدرن، نقشهها معمولاً بهصورت دوبعدی یا نیمهسهبعدی ساخته میشوند. نقشهبرداری 2D برای تشخیص دیوارها و مسیر حرکت کافی است، اما برخی مدلهای پیشرفته با دوربین ToF یا RGB اطلاعات عمق و ارتفاع را نیز تحلیل میکنند تا تشخیص اشیا دقیقتر شود. به همین دلیل جارو میتواند تفاوت میان پایه صندلی، کابل یا دمپایی را بهتر درک کند و از برخوردهای غیرضروری جلوگیری کند.
تعیین مسیر حرکت بهینه برای تمیزکاری
بعد از ساخت نقشه، مرحله مسیریابی آغاز میشود و سیستم مسیریابی جارو رباتیک تصمیم میگیرد دستگاه از چه مسیری حرکت کند. برخلاف مدلهای قدیمی که حرکت تصادفی داشتند، جاروهای جدید محیط را به بخشهای کوچک تقسیم میکنند و مسیرهای منظم رفتوبرگشتی میسازند تا هیچ ناحیهای جا نماند. در این مرحله، ربات علاوه بر کوتاهترین مسیر، میزان شارژ باتری، تراکم موانع و حتی نوع سطح زمین را هم در نظر میگیرد.
هوش مصنوعی در مدلهای جدید کمک میکند دستگاه الگوی خانه را بهمرور یاد بگیرد و مسیرها را بهینهتر کند. مثلاً اگر بخشی از خانه همیشه شلوغ باشد یا مانعی متحرک در آن قرار بگیرد، ربات در دفعات بعد رفتار متفاوتی نشان میدهد. این موضوع مخصوصاً در خانههای ایرانی با فرشهای متعدد، چیدمان متراکم و آستانههای بلند اهمیت زیادی دارد. اگر قصد بررسی مدلهای پیشرفته بازار را دارید، صفحه «خرید جارو روباتیک شیائومی» میتواند گزینههای مجهز به نقشهبرداری هوشمند را نمایش دهد.
ذخیره نقشه برای استفاده در نظافتهای بعدی
یکی از مهمترین قابلیتهای مدرن در نقشه برداری جارو رباتیک امکان ذخیره و مدیریت نقشه است. پس از پایان نظافت، نقشه در حافظه داخلی دستگاه یا اپلیکیشن ذخیره میشود تا ربات در دفعات بعد نیازی به اسکن مجدد کل خانه نداشته باشد. این ویژگی باعث میشود شروع نظافت سریعتر انجام شود و دستگاه بتواند مستقیم به اتاق یا ناحیه مشخصی برود.
در اپلیکیشن بسیاری از مدلها، کاربر میتواند اتاقها را نامگذاری کند، دیوار مجازی بسازد یا مناطق ممنوعه تعیین کند. برخی دستگاهها حتی از چند نقشه همزمان پشتیبانی میکنند تا برای خانه دوبلکس یا طبقات مختلف مناسب باشند. البته تغییر زیاد چیدمان، جابهجایی مبلمان یا وجود موانع جدید ممکن است باعث شود نقشه قبلی دقت خود را از دست بدهد و نیاز به بازسازی نقشه ایجاد شود.
فناوری نقشهبرداری جارو رباتیک شامل چه تکنولوژیهایی است؟
در قلب عملکرد مدلهای پیشرفته، مجموعهای از تکنولوژیها قرار دارد که فناوری نقشهبرداری جارو رباتیک را شکل میدهند. این فناوریها تعیین میکنند ربات چگونه محیط را اسکن کند، موقعیت خودش را تشخیص دهد و بهترین مسیر برای نظافت را انتخاب کند. مهمترین آنها شامل LiDAR، سیستم LDS، الگوریتم VSLAM، دوربینهای RGB و حسگرهای عمق مانند ToF هستند. هرکدام از این تکنولوژیها روش متفاوتی برای جمعآوری داده از محیط دارند و به همین دلیل دقت، سرعت و هزینه آنها نیز با هم متفاوت است.
در بازار جاروهای هوشمند، معمولاً دو رویکرد اصلی دیده میشود: مدلهایی که از **اسکن لیزری** برای اندازهگیری دقیق فاصلهها استفاده میکنند و مدلهایی که با **تحلیل تصویر دوربین** محیط را تشخیص میدهند. جاروهای لیزری معمولاً یک برجک کوچک روی بدنه دارند که نشاندهنده استفاده از سنسور LDS است، در حالی که مدلهای مبتنی بر VSLAM بیشتر به دوربین و پردازش تصویر متکی هستند. در ادامه، مهمترین تکنولوژیهای مورد استفاده در این حوزه را از نظر نحوه عملکرد، مزایا و محدودیتها بررسی میکنیم.
فناوری LiDAR یا LDS در نقشهبرداری جارو رباتیک
یکی از دقیقترین روشهای سیستم نقشهبرداری جارو رباتیک استفاده از فناوری LiDAR یا همان اسکن لیزری است. در این سیستم، یک سنسور لیزری که معمولاً در قالب برجک چرخان روی دستگاه قرار دارد، صدها پرتو لیزر را در جهات مختلف ارسال میکند و با اندازهگیری زمان بازگشت نور، فاصله اجسام را محاسبه میکند. این دادهها سپس توسط الگوریتم SLAM تحلیل شده و یک نقشه دقیق از دیوارها، موانع و مسیرهای قابل عبور ساخته میشود. به همین دلیل بسیاری از مدلهای حرفهای بازار با عنوان «جارو رباتیک LiDAR» یا «جارو رباتیک دارای LDS» شناخته میشوند.
مزیت اصلی این سیستم دقت بالا و عملکرد پایدار در شرایط نوری مختلف است؛ حتی در محیطهای کمنور نیز میتواند فاصله اجسام را بهدرستی تشخیص دهد. با این حال وجود برجک لیزری باعث افزایش ارتفاع دستگاه میشود و ممکن است عبور از زیر برخی مبلمان را دشوار کند. این فناوری معمولاً برای خانههای بزرگ یا فضاهایی با چند اتاق انتخاب بهتری محسوب میشود، زیرا نقشهبرداری سریع و قابل اعتماد ارائه میدهد.
سیستم نقشهبرداری VSLAM و استفاده از دوربین
در برخی مدلها بهجای لیزر از سیستم نقشه برداری جارو رباتیک مبتنی بر VSLAM استفاده میشود. در این روش، یک یا چند دوربین تصویر محیط را ثبت میکنند و الگوریتمهای پردازش تصویر با تحلیل ویژگیهای بصری مانند لبهها، بافتها و الگوهای محیط، موقعیت ربات را تخمین میزنند. در واقع ربات با مقایسه تصاویر متوالی، تغییر موقعیت خود را تشخیص داده و همزمان نقشه خانه را میسازد.
مزیت این روش کاهش هزینه سختافزار و امکان طراحی بدنه باریکتر است، زیرا دیگر نیازی به برجک لیزری وجود ندارد. اما عملکرد آن تا حدی به نور محیط وابسته است و در فضاهای تاریک یا یکنواخت ممکن است دقت کمتری داشته باشد. برخی مدلهای اقتصادی بازار و حتی برخی «جارو رباتیک شیائومی VSLAM» از این روش استفاده میکنند، بهخصوص برای خانههای کوچک یا آپارتمانهایی با چیدمان ساده.
نقشهبرداری دو بعدی (2D Mapping) در جارو رباتیک
بیشتر مدلهای موجود در بازار از سیستم مسیریابی جارو رباتیک مبتنی بر نقشهبرداری دوبعدی استفاده میکنند. در این روش، ربات تنها موقعیت اجسام روی سطح زمین را ثبت میکند و نقشهای از دیوارها، مبلمان و موانع کف ایجاد میکند. برای فرآیند نظافت، این اطلاعات معمولاً کافی است؛ زیرا هدف اصلی دستگاه حرکت در سطح زمین و پوشش کامل کف خانه است.
مزیت اصلی نقشهبرداری 2D سرعت پردازش بالا و مصرف کمتر منابع محاسباتی است. ربات میتواند محیط را به بخشهای کوچک تقسیم کرده و مسیرهای منظم رفتوبرگشتی طراحی کند. با این حال این سیستم در تشخیص ارتفاع برخی موانع محدودیت دارد؛ برای مثال ممکن است کابلهای باریک یا اشیای کوچک روی زمین را دیرتر تشخیص دهد.
نقشهبرداری سه بعدی (3D Mapping) و تشخیص ارتفاع موانع
در مدلهای پیشرفتهتر، از روش دقت نقشه برداری جارو رباتیک مبتنی بر نقشهبرداری سهبعدی استفاده میشود. در این سیستم علاوه بر موقعیت افقی اجسام، اطلاعات مربوط به ارتفاع و عمق نیز ثبت میشود. این دادهها معمولاً توسط سنسورهای عمق مانند ToF، دوربینهای استریو یا ترکیب LiDAR با دوربین RGB به دست میآیند.
نقشهبرداری سهبعدی باعث میشود ربات بتواند تفاوت میان اشیای مختلف را بهتر تشخیص دهد؛ مثلاً فرق بین پایه میز، کفش، اسباببازی یا کابل روی زمین. این ویژگی بهخصوص در خانههایی با چیدمان شلوغ یا وسایل زیاد کاربردی است. با این حال، پردازش دادههای سهبعدی پیچیدهتر است و معمولاً در مدلهای ردهبالا دیده میشود.
نقشهبرداری لحظهای (Real‑Time Mapping) و بهروزرسانی نقشه
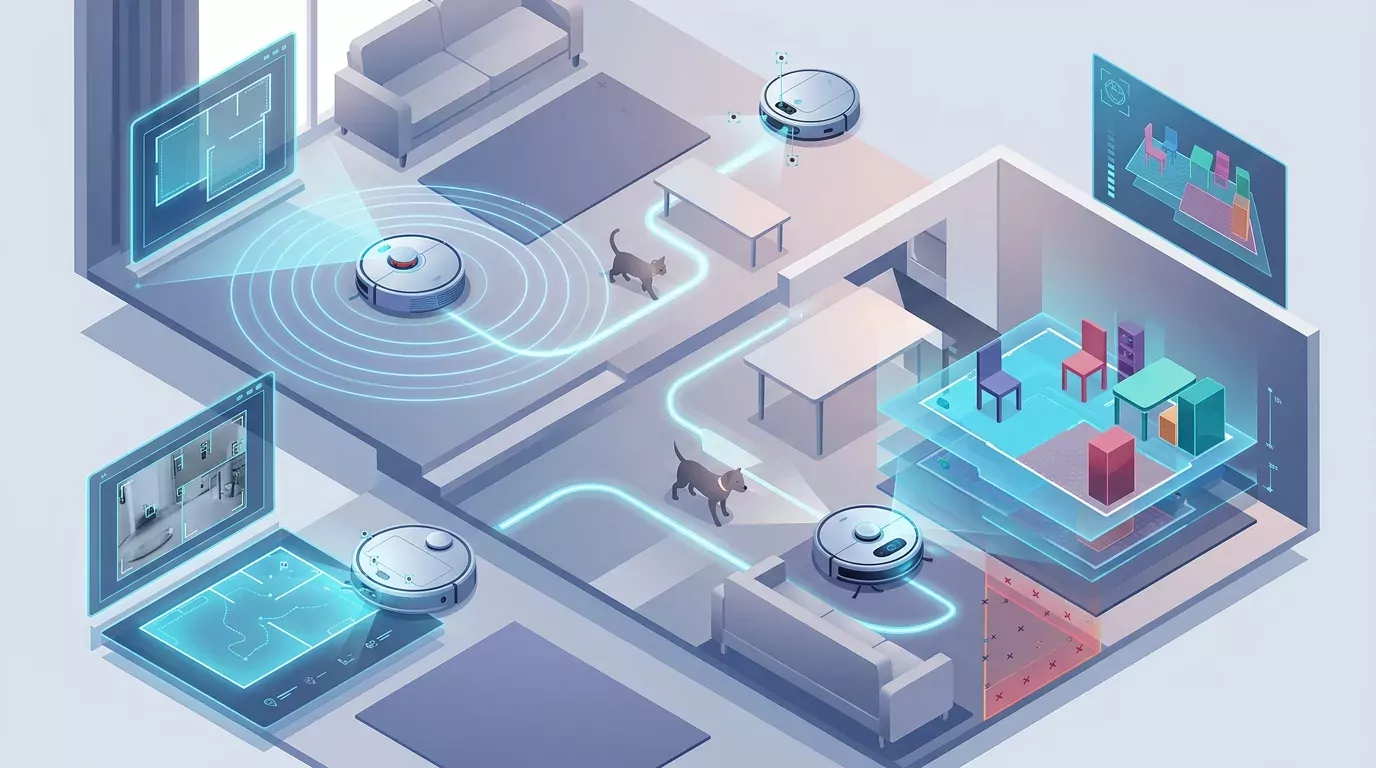
در نسل جدید دستگاهها، سیستم نقشه برداری جارو رباتیک بهصورت لحظهای بهروزرسانی میشود. به این معنی که ربات هنگام حرکت، نقشه محیط را دائماً اصلاح میکند و اگر مانع جدیدی ظاهر شود، مسیر حرکت خود را بلافاصله تغییر میدهد. این قابلیت بهویژه در خانههایی با چیدمان متغیر یا حضور افراد و حیوانات خانگی اهمیت دارد.
نقشه لحظهای معمولاً در اپلیکیشن موبایل نیز نمایش داده میشود و کاربر میتواند حرکت ربات را بهصورت زنده مشاهده کند. علاوه بر این، دستگاه میتواند اتاقها را بهصورت خودکار تقسیمبندی کند، مناطق ممنوعه تعریف کند و برای هر ناحیه برنامه نظافت جداگانه تنظیم کند. این سطح از مدیریت هوشمند نقشه یکی از مهمترین ویژگیهایی است که در مدلهای مدرن جارو رباتیک دیده میشود.
SLAM در سیستم نقشهبرداری جارو رباتیک چیست و چگونه کار میکند؟
در قلب عملکرد سیستم نقشهبرداری جارو رباتیک الگوریتمی به نام SLAM قرار دارد که مخفف Simultaneous Localization and Mapping است. این الگوریتم به ربات اجازه میدهد بهصورت همزمان دو کار پیچیده را انجام دهد: اول تعیین موقعیت دقیق خودش در محیط و دوم ساخت نقشهای از فضای اطراف. وقتی جارو رباتیک در خانه حرکت میکند، سنسورهایی مانند LiDAR، ژیروسکوپ، شتابسنج و حسگرهای فاصله دادههای محیطی را جمعآوری میکنند. سپس SLAM این دادهها را تحلیل کرده و یک مدل دیجیتال از محیط ایجاد میکند تا ربات بداند در کدام بخش خانه قرار دارد.
چالش اصلی اینجاست که ربات در ابتدا هیچ نقشهای از محیط ندارد. بنابراین باید همزمان با حرکت، محیط را کشف کند و موقعیت خود را نسبت به موانع و دیوارها محاسبه کند. در این فرآیند پدیدهای به نام خطای تجمعی میتواند رخ دهد؛ یعنی خطاهای کوچک در تخمین حرکت بهمرور جمع میشوند و ممکن است باعث انحراف نقشه شوند. برای کاهش این خطا، دادههای چندین سنسور با هم ترکیب میشوند و الگوریتم مرتباً موقعیت ربات را اصلاح میکند. به همین دلیل بسیاری از مدلهای پیشرفته «جارو رباتیک هوشمند» و بهخصوص مدلهای دارای LDS از نسخههای پیشرفته SLAM استفاده میکنند.
الگوریتم SLAM چگونه موقعیت جارو رباتیک را تشخیص میدهد؟
در فرایند جارو رباتیک چگونه نقشه میکشد الگوریتم SLAM ابتدا دادههای حرکتی و فاصلهای را جمعآوری میکند. ژیروسکوپ و شتابسنج مشخص میکنند ربات چه مقدار حرکت کرده و در چه جهتی چرخیده است، در حالی که سنسورهای فاصله مانند LiDAR یا مادونقرمز فاصله تا دیوارها و اشیا را اندازه میگیرند. این دادهها در قالب نقاط یا ویژگیهای محیطی ثبت میشوند و به مرور شبکهای از نقاط مرجع در نقشه ایجاد میکنند.
وقتی ربات دوباره از کنار یک مانع یا دیوار قبلاً ثبتشده عبور میکند، الگوریتم آن را بهعنوان یک نقطه مرجع تشخیص میدهد و موقعیت خود را اصلاح میکند. این فرآیند که Loop Closure نام دارد باعث میشود خطای تجمعی کاهش پیدا کند و نقشه دقیقتر شود. به همین دلیل حتی در خانههای بزرگ یا چنداتاقه نیز جارو رباتیک میتواند موقعیت خود را حفظ کرده و مسیر نظافت را گم نکند.
تفاوت LDS SLAM و Visual SLAM
در بسیاری از مدلهای پیشرفته، فناوری نقشهبرداری جارو رباتیک از دو نوع اصلی SLAM استفاده میکند: LDS SLAM و Visual SLAM. در LDS SLAM دادههای اصلی از سنسور لیزری LiDAR دریافت میشود. این سنسور با ارسال پرتوهای لیزر فاصله اجسام را اندازهگیری میکند و به همین دلیل دقت بالایی در تشخیص دیوارها و موانع دارد. جاروهایی که از این سیستم استفاده میکنند معمولاً همان مدلهای معروف با برجک لیزری هستند و در شرایط نوری مختلف عملکرد پایداری دارند.
در مقابل، Visual SLAM بیشتر بر تحلیل تصاویر دوربین تکیه دارد. در این روش، ربات با بررسی ویژگیهای بصری محیط مانند لبهها، الگوها و بافتها موقعیت خود را تخمین میزند. این سیستم معمولاً هزینه سختافزار کمتری دارد و باعث میشود بدنه دستگاه باریکتر باشد، اما وابستگی بیشتری به نور محیط دارد. به همین دلیل تفاوت LiDAR و VSLAM در جارو رباتیک بیشتر در دقت، عملکرد در تاریکی و پیچیدگی پردازش تصویر دیده میشود.
نقش هوش مصنوعی در بهبود نقشهبرداری
در نسلهای جدید نقشهبرداری جارو رباتیک، هوش مصنوعی نقش مهمی در تحلیل دادهها و بهبود کیفیت نقشه ایفا میکند. الگوریتمهای یادگیری ماشین میتوانند الگوهای محیط را تشخیص دهند و انواع موانع مانند کفش، کابل، اسباببازی یا پایه صندلی را دستهبندی کنند. این قابلیت کمک میکند ربات تصمیم بگیرد آیا باید از کنار مانع عبور کند، مسیر خود را تغییر دهد یا سرعت حرکت را کاهش دهد.
علاوه بر این، هوش مصنوعی به بهبود مدیریت نقشه در اپلیکیشن نیز کمک میکند. برخی جاروهای هوشمند میتوانند اتاقها را بهطور خودکار تشخیص دهند، مناطق پرتردد را شناسایی کنند و حتی پس از چند بار نظافت، مسیرهای بهینهتری طراحی کنند. این یادگیری تدریجی باعث میشود عملکرد دستگاه در هر بار استفاده دقیقتر شود و تجربه کاربر نیز بهبود پیدا کند.

سیستم مسیریابی جارو رباتیک چگونه بهترین مسیر نظافت را انتخاب میکند؟
بعد از اینکه سیستم مسیریابی جارو رباتیک نقشه محیط را دریافت میکند، مرحله تصمیمگیری برای حرکت آغاز میشود. بسیاری تصور میکنند داشتن نقشه بهتنهایی برای عملکرد هوشمند کافی است، اما در واقع نقشه فقط مدل محیط است و مسیریابی وظیفه دارد مشخص کند ربات دقیقاً از کجا حرکت کند، چه مسیری را انتخاب کند و چگونه تمام فضا را بدون تکرار پوشش دهد. به همین دلیل جاروهای پیشرفته علاوه بر نقشهبرداری، از الگوریتمهای پیچیده ناوبری و اجتناب از مانع استفاده میکنند.
در این فرایند، ربات ابتدا محیط را به بخشهای کوچک تقسیم میکند و سپس بر اساس موقعیت فعلی، میزان شارژ باتری، محل موانع و فاصله تا هر ناحیه، بهترین ترتیب نظافت را تعیین میکند. مدلهای مدرن «جارو رباتیک هوشمند» و بسیاری از محصولات «جارو رباتیک شیائومی» میتوانند در لحظه تصمیمگیری کنند؛ یعنی اگر مانع جدیدی ظاهر شود یا بخشی از مسیر بسته شود، الگوریتم بهسرعت مسیر جایگزین میسازد تا عملیات نظافت متوقف نشود.
تفاوت نقشهبرداری با مسیریابی در جارو رباتیک
در عملکرد سیستم نقشهبرداری جارو رباتیک باید بین سه مفهوم اصلی تفاوت قائل شد: نقشهبرداری، مسیریابی و اجتناب از مانع. نقشهبرداری یعنی ساخت مدل دیجیتال خانه؛ ربات دیوارها، اتاقها و موانع را ثبت میکند تا بداند محیط چه شکلی دارد. اما مسیریابی مرحلهای متفاوت است و مشخص میکند دستگاه از چه الگویی برای حرکت استفاده کند تا سریعتر و کاملتر نظافت انجام شود.
اجتناب از مانع نیز یک سیستم لحظهای است که هنگام حرکت فعال میشود. برای مثال اگر کودک اسباببازی جدیدی روی زمین بگذارد یا صندلی جابهجا شود، ربات باید بلافاصله آن را تشخیص دهد و مسیرش را تغییر دهد. بنابراین داشتن نقشه دقیق مهم است، اما بدون سیستم ناوبری و تشخیص موانع، جارو نمیتواند عملکرد هوشمند و روانی داشته باشد.
الگوریتمهای مسیریابی برای پوشش کامل محیط
در نسل جدید برای جواب به سوال جارو رباتیک چگونه نقشه میکشد باید پاسخ داد فقط هدف ساخت نقشه نیست، بلکه نحوه پوشش کامل محیط نیز اهمیت دارد. الگوریتمهای مسیریابی معمولاً از الگوهای حرکتی منظم مانند حرکت رفتوبرگشتی، مسیرهای شبکهای یا تقسیمبندی اتاقها استفاده میکنند تا هیچ نقطهای از خانه جا نماند. این روشها نسبت به حرکت تصادفی بسیار کارآمدتر هستند و زمان نظافت را کاهش میدهند.
برخی مدلها با کمک هوش مصنوعی حتی میتوانند رفتار محیط را تحلیل کنند. مثلاً اگر بخشی از خانه همیشه شلوغ باشد یا عبور از آن سختتر باشد، ربات در دفعات بعد مسیر متفاوتی انتخاب میکند. همچنین در خانههای بزرگ، دستگاه میتواند ابتدا نزدیکترین بخش را تمیز کند و سپس به سراغ اتاقهای دورتر برود تا مصرف انرژی بهینهتر شود.
نحوه تشخیص مناطق تمیز شده و نقاط باقیمانده
یکی از مهمترین بخشهای نقشهبرداری جارو رباتیک تشخیص نواحی تمیزشده و قسمتهای باقیمانده است. ربات هنگام حرکت، مسیر طیشده را در حافظه ثبت میکند و دائماً موقعیت فعلی خود را با نقشه تطبیق میدهد. به این ترتیب میفهمد کدام قسمتها پوشش داده شدهاند و کدام نواحی هنوز نیاز به نظافت دارند.
اگر مانعی باعث قطع مسیر شود یا شارژ باتری کاهش پیدا کند، دستگاه محل توقف را ذخیره میکند تا بعد از شارژ مجدد دقیقاً از همان نقطه ادامه دهد. این ویژگی مخصوصاً در خانههای چنداتاقه یا فضاهای بزرگ اهمیت زیادی دارد، زیرا مانع تکرار بیدلیل مسیرها و هدررفت انرژی میشود.
تأثیر نقشهبرداری دقیق در کاهش مصرف باتری
هرچه دقت نقشهبرداری جارو رباتیک بیشتر باشد، دستگاه مسیرهای کوتاهتر و منطقیتری انتخاب میکند. در مدلهای قدیمی که حرکت تصادفی داشتند، جارو ممکن بود بارها از یک نقطه عبور کند یا بخشی از خانه را فراموش کند. اما در سیستمهای مدرن، نقشه دقیق باعث میشود پوشش محیط با حداقل حرکت اضافی انجام شود.
این موضوع مستقیماً روی مصرف باتری تأثیر میگذارد. وقتی ربات مسیر بهینهتری داشته باشد، زمان کمتری صرف نظافت میکند و دفعات بازگشت به شارژر نیز کاهش پیدا میکند. علاوه بر این، الگوریتمهای جدید میتوانند میزان آلودگی یا نوع سطح را نیز در نظر بگیرند و توان مکش را متناسب با شرایط تنظیم کنند تا انرژی دستگاه هوشمندانهتر مصرف شود.
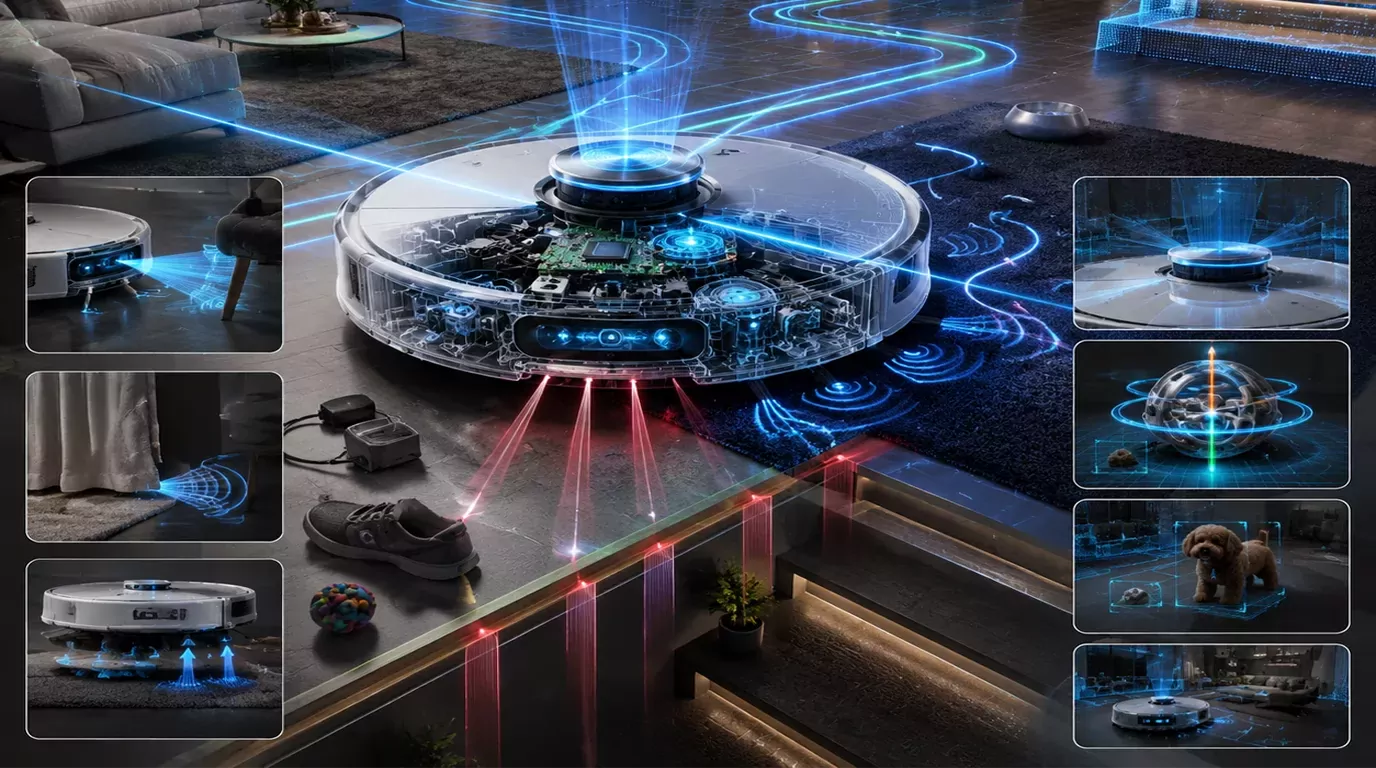
سنسورهای مورد استفاده در سیستم نقشهبرداری جارو رباتیک
عملکرد دقیق سیستم نقشهبرداری جارو رباتیک فقط به یک سنسور وابسته نیست، بلکه ترکیبی از چندین حسگر مختلف باعث میشود ربات بتواند محیط را تحلیل کند، موقعیت خود را تشخیص دهد و بدون برخورد یا سقوط حرکت کند. هر سنسور بخشی از اطلاعات محیط را جمعآوری میکند و نرمافزار مرکزی این دادهها را با هم ترکیب میکند تا یک تصویر کامل از خانه بسازد. به همین دلیل اگر یکی از سنسورها دچار خطا شود، سایر حسگرها میتوانند تا حدی دادههای ناقص را جبران کنند.
برای مثال LiDAR در اندازهگیری فاصله بسیار دقیق عمل میکند، اما ممکن است در مواجهه با سطوح بسیار براق یا آینهها دچار خطا شود. در این شرایط، سنسور برخورد یا دوربین میتواند وجود مانع را تأیید کند. همین ترکیب دادهها باعث میشود جاروهای پیشرفته عملکرد پایدارتری در خانههای واقعی داشته باشند؛ مخصوصاً در محیطهای شلوغ، خانههای دارای فرش زیاد یا فضاهایی با چیدمان متغیر.
سنسور LiDAR برای اندازهگیری فاصله و اسکن محیط
در بسیاری از مدلهای پیشرفته، فناوری نقشهبرداری جارو رباتیک بر پایه سنسور LiDAR یا LDS ساخته شده است. این سنسور با ارسال پالسهای لیزری و اندازهگیری زمان بازگشت آنها، فاصله دقیق تا دیوارها و اشیا را محاسبه میکند. نتیجه این فرایند، ساخت یک نقشه بسیار دقیق از محیط است که به ربات اجازه میدهد مسیرهای منظم و بهینه طراحی کند.
مزیت اصلی LiDAR عملکرد پایدار در نور کم یا تاریکی است. برخلاف سیستمهای دوربینمحور، این فناوری وابستگی زیادی به نور محیط ندارد و در خانههای بزرگ یا چنداتاقه دقت بالایی ارائه میدهد. البته سطوح بسیار براق، آینهها یا شیشههای شفاف ممکن است باعث بازتاب اشتباه لیزر شوند و روی دقت نقشه تأثیر بگذارند.
سنسور برخورد (Collision Sensor) برای تشخیص موانع
در فرایند سیستم مسیریابی جارو رباتیک سنسور برخورد نقش یک سیستم ایمنی فوری را دارد. این حسگر معمولاً در سپر جلویی دستگاه قرار میگیرد و زمانی فعال میشود که ربات با مانع تماس فیزیکی پیدا کند. در این حالت، دستگاه متوجه وجود مانع میشود و مسیر خود را تغییر میدهد.
اگرچه سنسور برخورد نسبت به LiDAR یا دوربین فناوری سادهتری دارد، اما همچنان یکی از مهمترین بخشهای سیستم ناوبری محسوب میشود. بسیاری از موانع کوچک یا اجسام تیره ممکن است بهدرستی توسط سنسورهای نوری تشخیص داده نشوند، اما برخورد فیزیکی باعث اصلاح مسیر خواهد شد. این سنسور بهخصوص در محیطهای شلوغ یا خانههایی با مبلمان متحرک اهمیت زیادی دارد.
سنسور پرتگاه یا Cliff Sensor برای جلوگیری از سقوط
یکی از حیاتیترین بخشهای نقشهبرداری جارو رباتیک سنسور پرتگاه یا Cliff Sensor است. این حسگر معمولاً در زیر دستگاه قرار دارد و با استفاده از مادون قرمز، اختلاف ارتفاع سطح را تشخیص میدهد. اگر سنسور متوجه شود سطح زیر دستگاه ناگهان قطع شده، ربات فوراً متوقف میشود یا تغییر مسیر میدهد.
این قابلیت از سقوط جارو از پلهها، اختلاف سطح بین اتاقها یا لبه سکوها جلوگیری میکند. البته فرشهای بسیار تیره یا سطوح مشکی گاهی نور مادون قرمز را جذب میکنند و ممکن است باعث تشخیص اشتباه شوند؛ به همین دلیل بعضی جاروها در عبور از فرشهای تیره دچار توقف ناگهانی میشوند.
ژیروسکوپ و شتابسنج برای حفظ جهت حرکت
در فناوری نقشهبرداری جارو رباتیک ژیروسکوپ و شتابسنج وظیفه تشخیص حرکت، سرعت و زاویه چرخش را بر عهده دارند. این سنسورها کمک میکنند ربات بفهمد چه مقدار حرکت کرده و در چه جهتی قرار دارد، حتی اگر دادههای محیطی موقتاً در دسترس نباشند.
این اطلاعات برای الگوریتم SLAM بسیار مهم هستند، زیرا به کاهش خطای تجمعی کمک میکنند. اگر LiDAR یا دوربین برای لحظهای نتوانند محیط را اسکن کنند، دادههای حرکتی ژیروسکوپ و شتابسنج باعث میشوند ربات همچنان موقعیت تقریبی خود را حفظ کند و مسیر را گم نکند.
سنسور اولتراسونیک برای تشخیص فرش و سطوح مختلف
در برخی مدلهای پیشرفته، سیستم نقشهبرداری جارو رباتیک از سنسور اولتراسونیک برای تشخیص نوع سطح استفاده میکند. این حسگر با ارسال امواج صوتی و تحلیل بازتاب آنها میتواند تفاوت بین کف سخت، فرش یا موانع نرم را تشخیص دهد.
این قابلیت مخصوصاً برای جاروهای دارای تیکشی هوشمند اهمیت دارد. دستگاه میتواند هنگام رسیدن به فرش، قدرت مکش را افزایش دهد یا پد تی را بالا ببرد تا فرش خیس نشود. همچنین سنسور اولتراسونیک در تشخیص پردهها، موانع نرم و اشیایی که بازتاب نوری ضعیفی دارند نیز مفید است.
دوربین و سنسور تصویر در جاروهای رباتیک پیشرفته
در نسل جدید فناوری نقشهبرداری جارو رباتیک بسیاری از مدلها از دوربین RGB و سنسور تصویر برای Visual SLAM استفاده میکنند. این دوربینها محیط را بهصورت تصویری تحلیل میکنند و ویژگیهایی مانند لبه دیوار، پایه میز یا الگوی کف را بهعنوان نقاط مرجع تشخیص میدهند.
ترکیب دوربین با هوش مصنوعی امکان تشخیص اشیا را نیز فراهم میکند. برخی جاروهای رباتیک میتوانند کابل، کفش، اسباببازی یا حتی فضولات حیوانات خانگی را شناسایی کنند و از برخورد با آنها جلوگیری کنند. البته عملکرد این سیستمها به نور محیط وابسته است و در تاریکی مطلق دقت کمتری نسبت به LiDAR دارند.
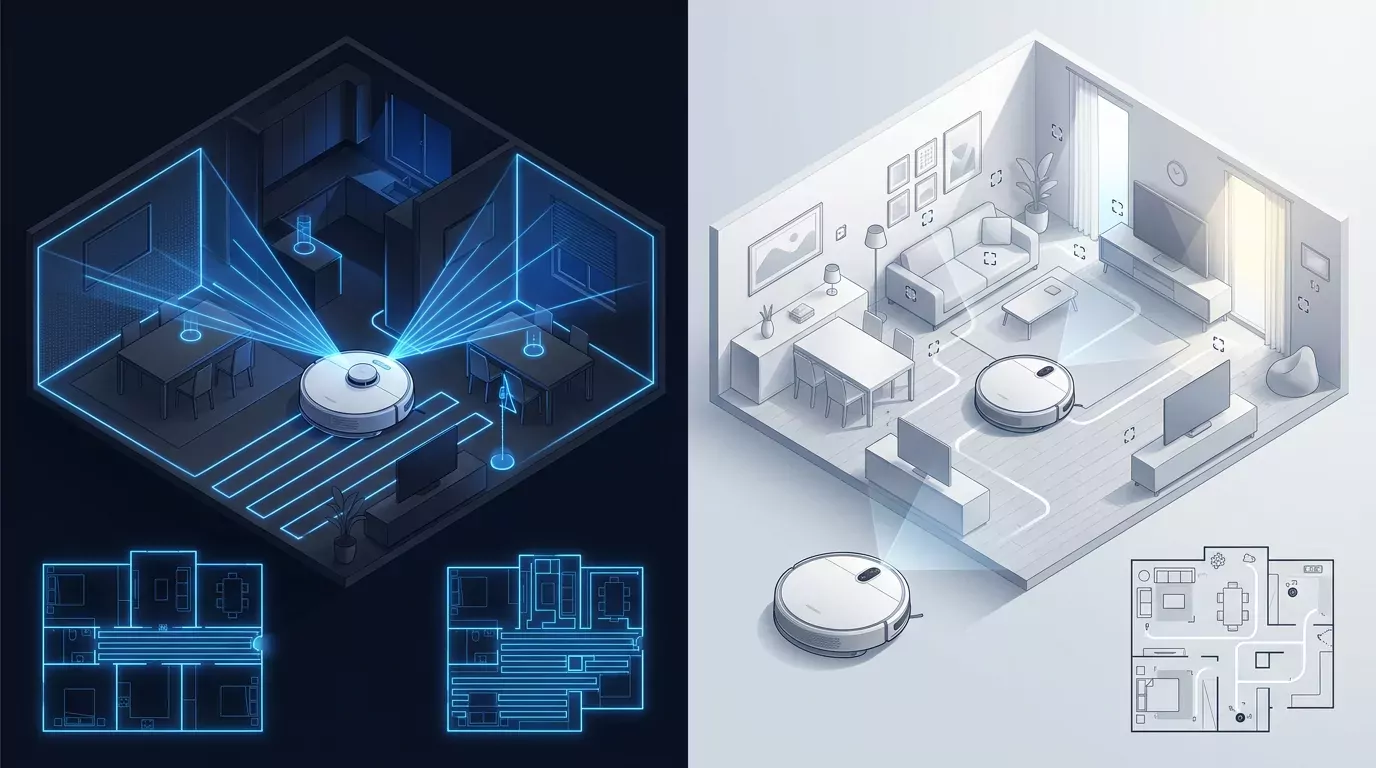
تفاوت سیستمهای نقشهبرداری جارو رباتیک (LiDAR vs VSLAM)
در بازار امروز، فناوری نقشهبرداری جارو رباتیک معمولاً بر پایه دو رویکرد اصلی ساخته میشود: سیستمهای لیزری LiDAR (یا LDS) و سیستمهای تصویری VSLAM. هر دو فناوری از الگوریتم SLAM برای ساخت نقشه استفاده میکنند، اما نوع دادهای که دریافت میکنند متفاوت است. LiDAR با استفاده از پالسهای لیزری فاصله دقیق اجسام را اندازهگیری میکند، در حالی که VSLAM با تحلیل تصاویر دوربین و ویژگیهای بصری محیط موقعیت ربات را تشخیص میدهد.
این تفاوت باعث میشود عملکرد هر فناوری در شرایط مختلف خانه متفاوت باشد. برای مثال در خانههای تاریک یا فضاهای بزرگ، سیستمهای لیزری معمولاً دقت و پایداری بیشتری دارند؛ به همین دلیل بسیاری از مدلهای پیشرفته «جارو رباتیک شیائومی» و سایر برندهای پرچمدار از LiDAR استفاده میکنند. در مقابل، جاروهای مبتنی بر دوربین اغلب قیمت پایینتری دارند و طراحی آنها باریکتر است، اما وابستگی بیشتری به نور محیط دارند.
جدول مقایسه LiDAR و VSLAM
در سناریوهای واقعی نیز این تفاوتها قابل مشاهده است. در خانههای بزرگ یا چندطبقه که مسیرهای طولانی وجود دارد، سیستم لیزری معمولاً نقشه دقیقتری تولید میکند. در مقابل، برای آپارتمانهای کوچک یا خانههایی با نور مناسب، جاروهای مبتنی بر دوربین نیز میتوانند عملکرد قابل قبولی ارائه دهند.
دقت نقشهبرداری در سیستم لیزری
در بسیاری از مدلهای پیشرفته، سیستم نقشهبرداری جارو رباتیک مبتنی بر LiDAR از یک اسکن ۳۶۰ درجه استفاده میکند. این سنسور در هر ثانیه هزاران نقطه فاصله را اندازهگیری میکند و یک نقشه دقیق از دیوارها، مبلمان و مسیرهای حرکتی ایجاد میکند. به همین دلیل ربات میتواند با دقت بالا اتاقها را تشخیص دهد و مسیرهای مستقیم و منظم برای نظافت طراحی کند.
این دقت بالا مخصوصاً در خانههای بزرگ یا محیطهایی با اتاقهای متعدد اهمیت دارد. جاروهای لیزری معمولاً سریعتر نقشه اولیه را میسازند و در دفعات بعدی نیز مسیرهای بهینهتری انتخاب میکنند. به همین دلیل بسیاری از مدلهای حرفهای که برای خانههای بزرگ طراحی شدهاند از همین فناوری استفاده میکنند.
مزایا و محدودیتهای نقشهبرداری با دوربین
در برخی مدلها، نقشهبرداری جارو رباتیک با استفاده از دوربین و فناوری Visual SLAM انجام میشود. در این روش، ربات محیط را تصویربرداری میکند و ویژگیهای بصری مانند لبه دیوارها، الگوهای کف یا اشیای ثابت را بهعنوان نقاط مرجع ثبت میکند. سپس با مقایسه این تصاویر، موقعیت خود را در نقشه تخمین میزند.
مزیت اصلی این فناوری هزینه کمتر و طراحی باریکتر دستگاه است، زیرا نیازی به برجک لیزری ندارد. با این حال، عملکرد آن به نور محیط وابسته است و در شرایط تاریک یا فضاهایی با الگوی بصری یکنواخت (مثلاً کفهای ساده یا فرشهای بدون طرح) دقت آن کاهش پیدا میکند. به همین دلیل در بسیاری از خانهها ترکیب دوربین با سنسورهای دیگر برای بهبود دقت استفاده میشود.
کدام فناوری برای خانههای بزرگ مناسبتر است؟
وقتی صحبت از خانههای بزرگ میشود، سیستم مسیریابی جارو رباتیک باید بتواند محیط وسیع را با حداقل خطا پوشش دهد. در این شرایط سیستمهای LiDAR معمولاً انتخاب بهتری هستند، زیرا اسکن لیزری مستقل از نور عمل میکند و میتواند مسیرهای طولانی را با دقت بالا ثبت کند.
برای خانههای شلوغ با مبلمان زیاد نیز سیستم لیزری معمولاً عملکرد پایدارتری دارد، زیرا موانع را سریعتر تشخیص میدهد و نقشه دقیقتری میسازد. در مقابل، جاروهای مبتنی بر دوربین بیشتر برای آپارتمانهای کوچک یا فضاهایی با نور کافی مناسب هستند. به همین دلیل اگر خانه بزرگ، چنداتاقه یا دارای نور کم باشد، انتخاب یک مدل لیزری معمولاً تجربه نظافت دقیقتر و قابل اعتمادتری فراهم میکند.
نقشه جارو رباتیک چگونه در اپلیکیشن ذخیره و مدیریت میشود؟
بعد از اینکه سیستم نقشهبرداری جارو رباتیک محیط خانه را اسکن میکند، اطلاعات نقشه در حافظه داخلی دستگاه و اپلیکیشن موبایل ذخیره میشود. این نقشه فقط یک تصویر ساده نیست؛ بلکه شامل دادههایی مانند موقعیت دیوارها، مرز اتاقها، مسیرهای طیشده، موانع ثابت و نقاط ممنوعه است. اپلیکیشنهایی مثل Xiaomi Home این اطلاعات را به یک رابط کاربری تعاملی تبدیل میکنند تا کاربر بتواند نحوه نظافت را دقیقتر کنترل کند.
در مدلهای پیشرفته، نقشه پس از هر بار نظافت بهروزرسانی میشود و تغییرات محیط را تشخیص میدهد. برای مثال اگر مبلمان جابهجا شود یا اتاق جدیدی اضافه شود، جارو میتواند نقشه را اصلاح کند. همین قابلیت باعث شده مدیریت نظافت در خانههای بزرگ یا چندطبقه بسیار سادهتر شود، مخصوصاً در مدلهای هوشمند «جارو رباتیک شیائومی» که امکاناتی مثل تقسیم اتاق، Zone Cleaning و ذخیره چند نقشه را ارائه میدهند.
تقسیمبندی اتاقها در نقشه خانه
در اپلیکیشنهای مدرن، فناوری نقشهبرداری جارو رباتیک فقط به ساخت یک نقشه خام محدود نمیشود، بلکه سیستم میتواند اتاقها را نیز بهصورت خودکار تشخیص دهد. الگوریتم نقشهبرداری معمولاً بر اساس دیوارها، درگاهها و مسیرهای حرکتی، فضاهای مختلف خانه را از هم تفکیک میکند و هر اتاق را با رنگ جداگانه نمایش میدهد.
کاربر میتواند این تقسیمبندی را ویرایش کند؛ مثلاً دو اتاق را ادغام کند یا یک فضای بزرگ را به چند بخش تقسیم کند. این قابلیت برای زمانبندی نظافت بسیار کاربردی است، چون میتوان مشخص کرد فقط آشپزخانه یا اتاق خواب تمیز شود، بدون اینکه کل خانه درگیر فرآیند نظافت شود.
تعیین مناطق ممنوعه (No-Go Zone)
یکی از مهمترین امکانات فناوری نقشهبرداری جارو رباتیک قابلیت تعریف No-Go Zone است. در این حالت کاربر میتواند روی نقشه بخشهایی را مشخص کند که جارو اجازه ورود به آنها را نداشته باشد؛ مثلاً اطراف سیمهای برق، ظرف غذای حیوانات خانگی یا اتاقی که کودک در آن خوابیده است.
این مناطق ممنوعه مستقیماً در حافظه نقشه ذخیره میشوند و جارو هنگام برنامهریزی مسیر، آن نواحی را نادیده میگیرد. برخلاف نسلهای قدیمی که نیاز به نوار مغناطیسی یا دیوار مجازی فیزیکی داشتند، در مدلهای جدید همه چیز از طریق اپلیکیشن کنترل میشود و تغییر تنظیمات فقط چند ثانیه زمان میبرد.
انتخاب نظافت ناحیهای (Zone Cleaning)
در قابلیت Zone Cleaning، سیستم مسیریابی جارو رباتیک به کاربر اجازه میدهد فقط یک بخش خاص از خانه را برای نظافت انتخاب کند. مثلاً بعد از ریختن خوراکی روی زمین، نیازی نیست کل خانه دوباره جارو شود؛ کافی است محدوده موردنظر روی نقشه مشخص شود تا ربات فقط همان قسمت را تمیز کند.
این قابلیت علاوه بر صرفهجویی در زمان، مصرف باتری را نیز کاهش میدهد. برخی مدلها امکان تعیین چند ناحیه همزمان یا افزایش تعداد دفعات نظافت در یک محدوده خاص را هم ارائه میدهند. به همین دلیل Zone Cleaning یکی از کاربردیترین امکانات برای خانههای پررفتوآمد محسوب میشود.
ذخیره چند نقشه برای خانههای چند طبقه
در خانههای دوبلکس یا چندطبقه، نقشهبرداری جارو رباتیک باید بتواند چند محیط مختلف را بهصورت مستقل ذخیره کند. قابلیت Multi-Floor Map این امکان را فراهم میکند که جارو برای هر طبقه یک نقشه جداگانه نگه دارد و هنگام جابهجایی بین طبقات، بهطور خودکار نقشه صحیح را تشخیص دهد.
این ویژگی باعث میشود نیازی به اسکن مجدد هر طبقه وجود نداشته باشد و تنظیماتی مثل No-Go Zone یا تقسیمبندی اتاقها برای هر نقشه بهصورت جداگانه ذخیره شوند. در اکوسیستم Xiaomi Home این فرآیند کاملاً یکپارچه انجام میشود و کاربر میتواند مدیریت همه نقشهها را از طریق یک اپلیکیشن واحد انجام دهد.

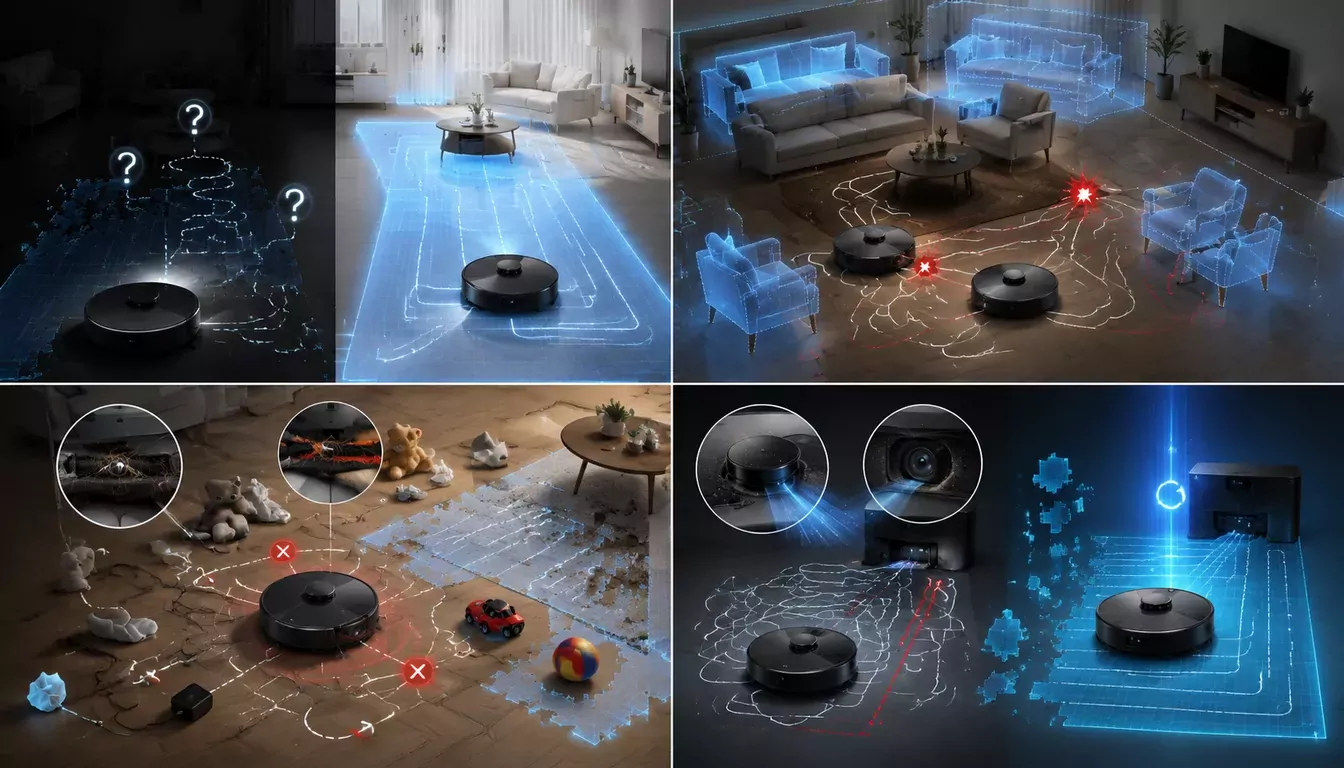
چرا گاهی نقشهبرداری جارو رباتیک دچار خطا میشود؟
با وجود پیشرفت زیاد در سیستم نقشهبرداری جارو رباتیک هنوز هم ممکن است گاهی نقشه خانه بهدرستی ثبت نشود یا مسیر حرکت ربات دچار اشتباه شود. این خطاها معمولاً به دلیل محدودیت سنسورها، تغییرات محیط یا مشکلات نرمافزاری رخ میدهند. نشانههای رایج شامل ایجاد نقشه ناقص، شناسایی اشتباه اتاقها، حرکت نامنظم، گیر کردن مکرر یا فراموش کردن بخشی از خانه است.
برخلاف تصور بسیاری از کاربران، این مشکلات همیشه به معنی خرابی دستگاه نیستند. الگوریتمهای SLAM برای تصمیمگیری به دادههای محیطی وابستهاند و اگر دادهها ناقص یا متناقض باشند، کیفیت نقشه کاهش پیدا میکند. به همین دلیل شناخت علت فنی خطاها میتواند به رفع سریعتر مشکل کمک کند و مانع از ریست یا تعویض غیرضروری دستگاه شود.
تأثیر نور محیط بر سیستمهای دوربینی
در مدلهایی که فناوری نقشهبرداری جارو رباتیک بر پایه دوربین و VSLAM کار میکند، نور محیط نقش بسیار مهمی دارد. این جاروها برای تشخیص موقعیت، تصاویر محیط را تحلیل میکنند و اگر نور کافی وجود نداشته باشد، الگوریتم نمیتواند نقاط مرجع را بهدرستی تشخیص دهد.
نشانه این مشکل معمولاً حرکت نامنظم در شب، ثبت ناقص نقشه یا گم شدن موقعیت ربات است. راهحل اصلی، افزایش نور محیط یا استفاده از روشنایی غیرمستقیم هنگام نظافت است. در خانههایی که بیشتر نظافت شبانه انجام میشود، مدلهای مجهز به LiDAR معمولاً عملکرد پایدارتری دارند چون وابستگی بسیار کمتری به نور دارند.
مشکلات ناشی از تغییر چیدمان خانه
یکی از دلایل رایج خطا در نقشهبرداری جارو رباتیک تغییر ناگهانی چیدمان خانه است. وقتی مبلمان جابهجا میشود یا مانع جدیدی در مسیر قرار میگیرد، نقشه ذخیرهشده دیگر با محیط واقعی مطابقت کامل ندارد و ربات ممکن است در تشخیص مسیر دچار اشتباه شود.
نشانه این وضعیت معمولاً برخوردهای غیرعادی، ایجاد اتاقهای تکراری روی نقشه یا حرکتهای رفتوبرگشتی است. بهترین راهحل این است که بعد از تغییرات بزرگ در دکوراسیون، یک نقشهبرداری مجدد انجام شود یا اجازه دهید جارو چند بار محیط را دوباره اسکن کند تا نقشه جدید را تثبیت کند.
موانع کوچک مانند کابلها و اشیای پراکنده
در عملکرد سیستم مسیریابی جارو رباتیک موانع کوچک یکی از چالشهای اصلی محسوب میشوند. کابلهای شارژر، اسباببازیهای کوچک، جوراب یا اشیای پراکنده روی زمین ممکن است توسط بعضی سنسورها بهدرستی تشخیص داده نشوند و باعث گیر کردن ربات شوند.
نشانه این مشکل توقف ناگهانی، گیر کردن برسها یا ایجاد مسیرهای ناقص در نقشه است. راهحل مؤثر این است که قبل از شروع نظافت، اشیای کوچک از سطح زمین جمع شوند. برخی مدلهای جدید با دوربین هوش مصنوعی میتوانند این موانع را شناسایی کنند، اما همچنان مرتب بودن محیط تأثیر زیادی در دقت نقشهبرداری دارد.
خطاهای سنسورها یا بهروزرسانی نرمافزار
گاهی اوقات اختلال در سیستم مسیریابی جارو رباتیک به دلیل آلودگی سنسورها یا مشکلات نرمافزاری رخ میدهد. گردوغبار روی LiDAR، کثیفی لنز دوربین یا خطای سنسور ژیروسکوپ میتواند دادههای اشتباه به سیستم SLAM ارسال کند و باعث ساخت نقشه ناقص شود.
نشانههای این مشکل شامل چرخشهای غیرعادی، گم کردن موقعیت، ایجاد نقشههای بههمریخته یا بازگشت اشتباه به داک شارژ است. تمیز کردن سنسورها، ریست نقشه و نصب آخرین بهروزرسانی Firmware معمولاً مشکل را برطرف میکند. در بسیاری از مدلهای جدید، آپدیت نرمافزاری میتواند دقت تشخیص موانع و کیفیت نقشهبرداری را بهطور محسوسی بهبود دهد.
چگونه دقت سیستم نقشهبرداری جارو رباتیک را افزایش دهیم؟
عملکرد دقیق سیستم نقشهبرداری جارو رباتیک فقط به کیفیت سختافزار وابسته نیست؛ شرایط محیطی خانه نیز تأثیر مستقیمی روی کیفیت نقشه دارد. حتی پیشرفتهترین الگوریتمهای SLAM هم اگر دادههای ناقص یا متناقض دریافت کنند، نمیتوانند نقشه کاملاً دقیقی تولید کنند. به همین دلیل رعایت چند نکته ساده میتواند دقت مسیریابی، سرعت نظافت و حتی عمر باتری دستگاه را بهبود دهد.
بسیاری از خطاهای رایج مانند ایجاد اتاقهای اشتباه، حرکت نامنظم یا جا افتادن بخشی از خانه، در واقع ناشی از شرایط نامناسب هنگام اسکن اولیه هستند. مرتب بودن محیط، نور کافی، تمیز بودن سنسورها و بهروزرسانی Firmware باعث میشود سنسورها دادههای دقیقتری ثبت کنند و الگوریتم پردازش مسیر تصمیمگیری بهتری داشته باشد.
آمادهسازی خانه قبل از اولین نقشهبرداری
در مرحله اول جارو رباتیک چگونه نقشه میکشد مهمترین موضوع این است که محیط تا حد ممکن قابل پیشبینی باشد. کابلها، کفشها، اسباببازیها یا اشیای کوچک روی زمین میتوانند بهعنوان مانع موقت ثبت شوند و نقشه اولیه را دچار خطا کنند. اگر این اشیا بعداً جابهجا شوند، ربات هنگام استفاده روزمره دچار سردرگمی خواهد شد.
بهتر است قبل از اولین اسکن، مسیرهای اصلی خانه باز باشند و درهای اتاقهایی که قرار است در نقشه ثبت شوند باز بمانند. این کار باعث میشود الگوریتم SLAM بتواند ارتباط فضایی بین اتاقها را دقیقتر تشخیص دهد و نقشه نهایی ساختار منظمتری داشته باشد. همچنین توصیه میشود پایه شارژ در محلی ثابت و با فضای خالی مناسب اطراف آن قرار بگیرد تا بازگشت ربات به داک بدون خطا انجام شود.
بهترین زمان برای انجام اسکن اولیه خانه
در مدلهای مبتنی بر دوربین، فناوری نقشهبرداری جارو رباتیک برای تحلیل محیط به نور کافی نیاز دارد. بهترین زمان برای اسکن اولیه معمولاً ساعات روز یا زمانی است که نور یکنواخت در خانه وجود داشته باشد. نور بسیار کم، سایههای شدید یا تغییر ناگهانی روشنایی میتواند باعث تشخیص اشتباه دیوارها و موانع شود.
حتی در مدلهای LiDAR نیز روشنایی مناسب میتواند به عملکرد بهتر سنسورهای کمکی کمک کند. علاوه بر نور، بهتر است اولین نقشهبرداری زمانی انجام شود که رفتوآمد افراد در خانه کم باشد. حرکت مداوم انسانها یا حیوانات خانگی ممکن است بهعنوان مانع متحرک ثبت شود و روی کیفیت نقشه اولیه تأثیر بگذارد.
جلوگیری از ایجاد خطا در نقشه
برای حفظ دقت نقشهبرداری جارو رباتیک در طول زمان، تمیز نگه داشتن سنسورها اهمیت زیادی دارد. گردوغبار روی برجک LiDAR، لنز دوربین یا سنسورهای مادون قرمز باعث کاهش دقت اندازهگیری میشود و دادههای اشتباه وارد سیستم ناوبری میکند. تمیز کردن دورهای سنسورها با دستمال نرم میتواند کیفیت اسکن را بهطور محسوسی بهبود دهد.
همچنین بهروزرسانی Firmware نقش مهمی در عملکرد دستگاه دارد. بسیاری از برندها از طریق آپدیت نرمافزاری الگوریتمهای تشخیص مانع، مدیریت نقشه و مسیریابی را بهینه میکنند. اگر جارو پس از مدتی رفتار غیرعادی داشت، حذف نقشه قدیمی و انجام یک اسکن جدید نیز میتواند خطاهای تجمعی را کاهش دهد و دقت مسیرها را بازیابی کند.
جمعبندی: سیستم نقشهبرداری جارو رباتیک چگونه تجربه نظافت را هوشمند میکند؟
امروزه سیستم نقشهبرداری جارو رباتیک فقط یک قابلیت جانبی نیست، بلکه مهمترین بخش هوشمند جاروهای رباتیک مدرن محسوب میشود. فناوریهایی مثل LiDAR، VSLAM و الگوریتم SLAM باعث شدهاند این دستگاهها بتوانند محیط خانه را تحلیل کنند، بهترین مسیر را انتخاب کنند و با کمترین خطا کل فضا را پوشش دهند. تفاوت اصلی مدلهای حرفهای و اقتصادی نیز دقیقاً در کیفیت همین سیستم نقشهبرداری و مسیریابی دیده میشود.
اگر خانهای بزرگ، چندطبقه یا دارای نور کم دارید، مدلهای لیزری معمولاً دقت و پایداری بیشتری ارائه میدهند. در مقابل، جاروهای مبتنی بر دوربین میتوانند برای فضاهای کوچکتر و بودجه محدود گزینه مناسبی باشند. همچنین امکاناتی مثل تقسیم اتاق، No-Go Zone، Zone Cleaning و ذخیره چند نقشه باعث شده تجربه نظافت کاملاً شخصیسازی شود و کاربر کنترل بسیار بیشتری روی عملکرد دستگاه داشته باشد.
در زمان انتخاب دستگاه، بهتر است فقط به قدرت مکش توجه نکنید و کیفیت نقشهبرداری، نوع سنسورها، عملکرد در شب و دقت مسیریابی را نیز بررسی کنید.

فروشگاه PB360 مجموعهای از جدیدترین جاروهای رباتیک مجهز به فناوریهای LiDAR و Visual SLAM را ارائه میدهد تا بتوانید متناسب با نیاز واقعی خانه خود، انتخابی دقیقتر و حرفهایتر داشته باشید.