فناوری تشخیص موانع با AI در جارو رباتیک؛ راز حرکت هوشمند جاروهای نسل جدید

تشخیص موانع در جارو رباتیک چیست و چرا اهمیت دارد؟
اگر قصد خرید جارو رباتیک را دارید، آشنایی با سیستم تشخیص موانع اهمیت زیادی دارد زیرا این فناوری تعیین میکند دستگاه تا چه اندازه میتواند بدون برخورد یا گیر کردن محیط خانه را تمیز کند.
پیشرفت جاروهای رباتیک تا حد زیادی به توانایی آنها در درک محیط اطراف وابسته است. در نسلهای جدید، این دستگاهها دیگر صرفاً یک وسیله مکنده ساده نیستند؛ بلکه با استفاده از مجموعهای از سنسورها، دوربینها و الگوریتمهای پیشرفته پردازش تصویر، محیط خانه را تحلیل کرده و مسیر بهینهای برای حرکت انتخاب میکنند.
تشخیص موانع در جارو رباتیک به توانایی دستگاه در شناسایی اشیایی مانند پایه مبلمان، کابلها، اسباببازیها یا حتی کفشهایی که روی زمین قرار دارند اشاره دارد. این فناوری باعث میشود جارو بدون برخورد شدید، گیر کردن یا توقفهای مکرر در خانه حرکت کند و فرآیند نظافت را با دقت و کارایی بیشتری انجام دهد.
اهمیت این فناوری زمانی مشخص میشود که به چالشهای خانههای واقعی توجه کنیم. محیطهای خانگی معمولاً دارای موانع متغیر، سطوح مختلف کف و اشیای کوچک پراکنده هستند؛ شرایطی که بدون تحلیل هوشمند محیط، حرکت دقیق دستگاه تقریباً غیرممکن میشود. سیستمهای پیشرفته با استفاده از ترکیب نقشهبرداری محیط، تحلیل فاصله و پردازش دادههای سنسوری میتوانند مسیر حرکت را بهصورت پویا اصلاح کنند. نتیجه این فرآیند نهتنها کاهش برخورد با اشیاء، بلکه افزایش سرعت نظافت، مصرف بهینه باتری و جلوگیری از توقفهای ناخواسته در حین کار است.
چرا جاروهای رباتیک بدون سیستم تشخیص مانع عملکرد ضعیفی دارند؟
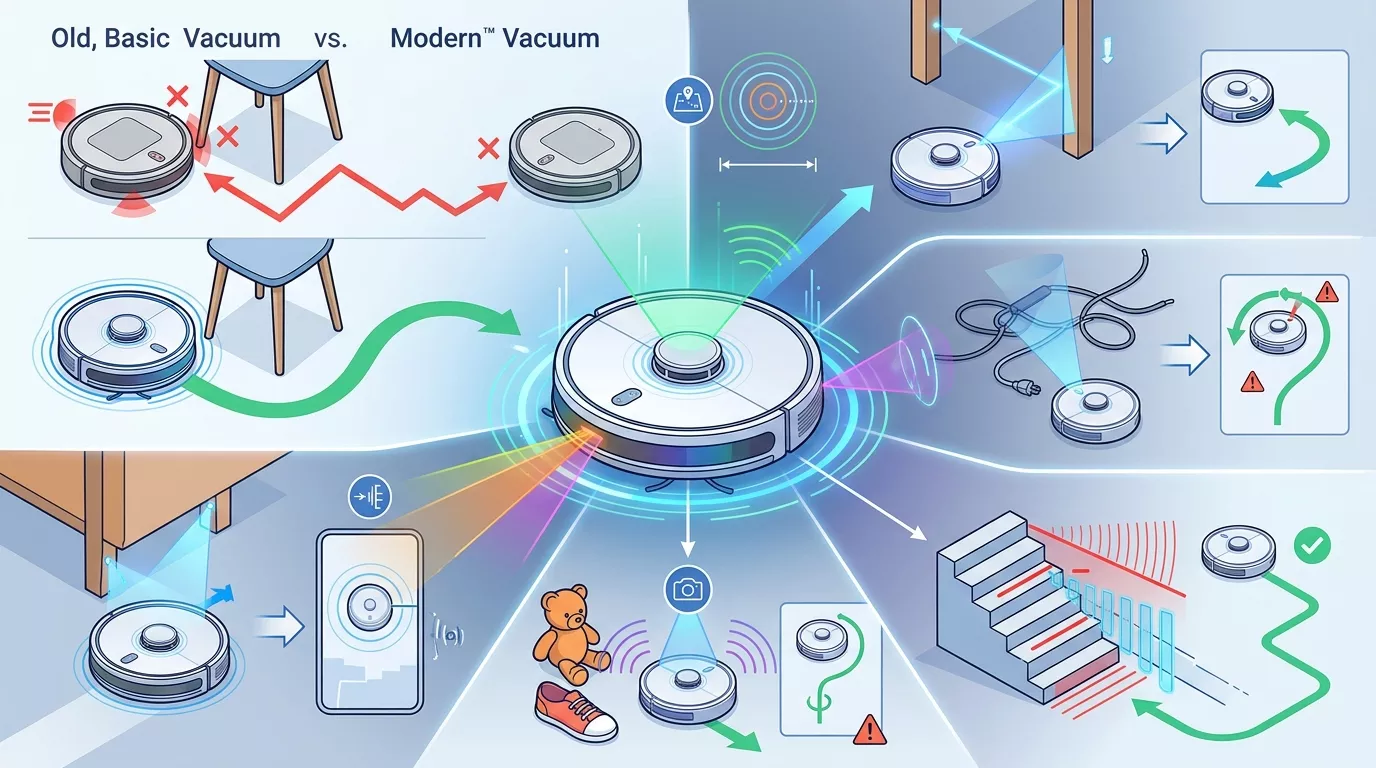
مدلهای اولیه جارو رباتیک معمولاً از الگوریتمهای بسیار ساده برای حرکت استفاده میکردند و اغلب بر اساس برخورد فیزیکی با اجسام جهت خود را تغییر میدادند. در چنین ساختاری، دستگاه تا زمانی که با مانع برخورد نمیکرد، متوجه وجود آن نمیشد. نبود یک سیستم تشخیص مانع در جارو رباتیک باعث میشد دستگاه بارها به پایه میز، دیوار یا وسایل خانه برخورد کند و در بسیاری از موارد نیز در میان کابلها، اسباببازیها یا لبه فرش گیر بیفتد. این نوع حرکت تصادفی علاوه بر کاهش کیفیت نظافت، باعث افزایش زمان تمیزکاری و مصرف بیشتر انرژی میشد.
مشکل دیگر این جاروها ناتوانی در تشخیص موانع پیچیده و کوچک بود. کابلهای شارژر، بند پرده یا اشیای باریک روی زمین معمولاً توسط سنسورهای ساده قابل شناسایی نبودند و همین موضوع باعث توقف کامل دستگاه میشد. در خانههایی با چیدمان متراکم یا مبلمان زیاد، این محدودیتها بیشتر به چشم میآید. به همین دلیل در نسلهای جدید تلاش شده است با ترکیب فناوریهایی مانند نقشهبرداری محیط، سنسور فاصله و پردازش تصویر، حرکت دستگاه از حالت واکنشی به حالت پیشبینانه تبدیل شود.
نقش تشخیص موانع در افزایش دقت نظافت و جلوگیری از گیر کردن دستگاه
در جاروهای رباتیک مدرن، توانایی شناسایی اشیای مختلف نقش مستقیمی در کیفیت نظافت دارد. زمانی که دستگاه بتواند کابلها، پایه مبلمان، کفشها یا اشیای کوچک را بهدرستی تشخیص دهد، مسیر حرکت خود را بهگونهای تنظیم میکند که هم پوشش نظافت کاملتر شود و هم احتمال گیر کردن به حداقل برسد. در اینجا مفهوم تشخیص موانع در جارو رباتیک با هوش مصنوعی اهمیت پیدا میکند؛ زیرا الگوریتمهای یادگیری ماشین میتوانند انواع مختلف اشیا را از طریق دادههای تصویری و اطلاعات سنسورها شناسایی کرده و مسیر جایگزین مناسبی انتخاب کنند.
این قابلیت علاوه بر جلوگیری از توقف دستگاه، به بهینهسازی فرآیند تمیزکاری نیز کمک میکند. وقتی جارو رباتیک محیط را بهصورت دقیق تحلیل میکند، میتواند مسیرهای غیرضروری را حذف کرده و بهصورت ساختارمند بخشهای مختلف خانه را پوشش دهد. چنین رویکردی باعث کاهش مصرف باتری، افزایش سرعت نظافت و کاهش استهلاک قطعات میشود. به همین دلیل در بسیاری از مدلهای پیشرفته، تشخیص مانع با فناوریهایی مانند نقشهبرداری سهبعدی و تحلیل دادههای محیطی ترکیب شده تا دستگاه بتواند حتی در محیطهای شلوغ نیز عملکردی پایدار و دقیق ارائه دهد.
سیستم تشخیص مانع در جارو رباتیک چگونه کار میکند؟
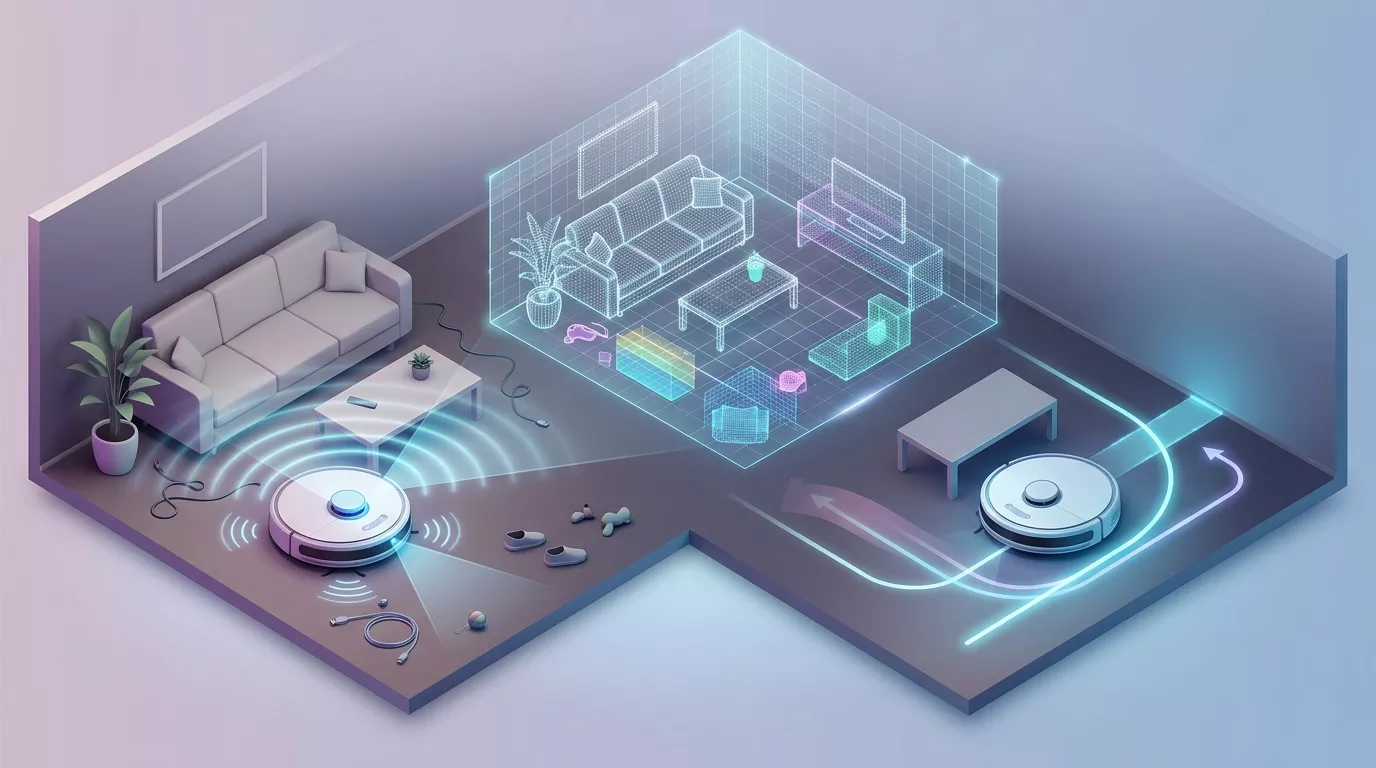
در جاروهای رباتیک مدرن، تشخیص و مدیریت موانع بر اساس یک معماری چندمرحلهای انجام میشود که شامل دریافت داده از محیط، تحلیل اطلاعات و در نهایت تصمیمگیری برای تغییر مسیر حرکت است. در این فرآیند، دستگاه ابتدا با استفاده از مجموعهای از سنسورها و ماژولهای تصویربرداری محیط اطراف خود را اسکن میکند و دادههایی مانند فاصله تا اشیا، شکل موانع و ساختار فضا را ثبت میکند. هسته این فرآیند همان سیستم تشخیص مانع در جارو رباتیک است که وظیفه دارد این دادههای خام را به اطلاعات قابلاستفاده برای حرکت تبدیل کند. در واقع، جارو رباتیک از طریق این سیستم میتواند محیط خانه را مانند یک نقشه پویا درک کند و از برخورد با اشیا جلوگیری کند.
پس از دریافت دادهها، الگوریتمهای پردازش و نقشهبرداری محیط وارد عمل میشوند. این الگوریتمها دادههای سنسورها را با مدلهای فضایی ترکیب میکنند تا مسیرهای قابلحرکت و مناطق دارای مانع مشخص شوند. در بسیاری از مدلهای پیشرفته، این فرآیند با فناوریهایی مانند SLAM و تحلیل بلادرنگ محیط انجام میشود. نتیجه این تحلیلها به موتور ناوبری دستگاه ارسال میشود تا بهترین مسیر حرکت انتخاب شود. چنین معماری هوشمندی باعث میشود جارو رباتیک حتی در خانههایی با چیدمان پیچیده، بدون برخورد با اشیا یا گیر کردن در مسیر، عملیات نظافت را ادامه دهد.
ترکیب سنسورها، دوربینها و LiDAR در درک محیط
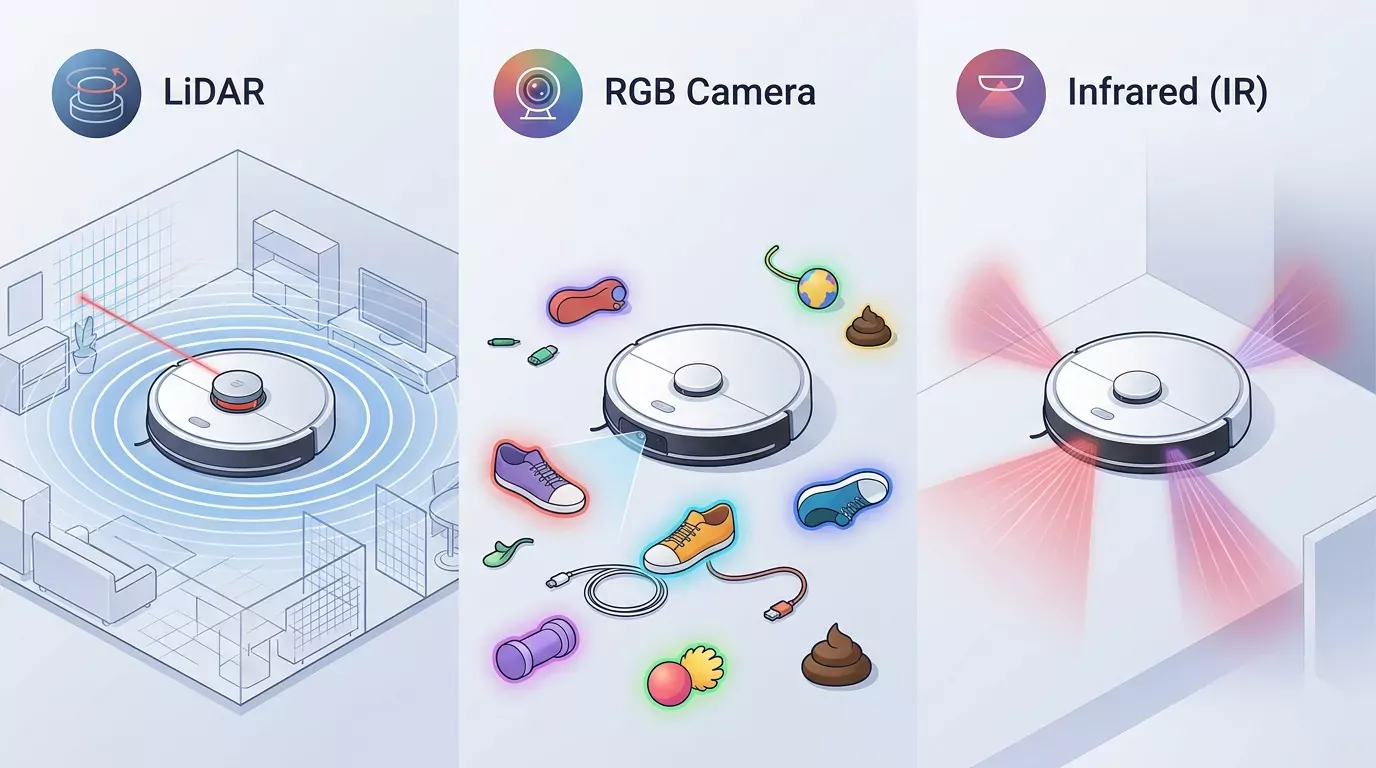
برای اینکه یک جارو رباتیک بتواند موانع را با دقت بالا تشخیص دهد، به مجموعهای از حسگرهای مختلف نیاز دارد که هرکدام بخشی از اطلاعات محیط را ثبت میکنند. سنسورهای فاصله، سنسورهای مادون قرمز و حسگرهای برخورد از جمله ابزارهایی هستند که برای تشخیص فاصله تا اشیا و جلوگیری از برخورد استفاده میشوند. در کنار این حسگرها، دوربینهای تصویربرداری و ماژولهای LiDAR نیز به دستگاه کمک میکنند تا ساختار سهبعدی محیط را درک کند. این ترکیب سختافزاری یکی از پایههای اصلی فناوری تشخیص موانع با AI در جارو رباتیک محسوب میشود زیرا دادههای مختلف باید در کنار هم تحلیل شوند تا تصویر دقیقی از محیط به دست آید.
برای مثال در بسیاری از مدلهای پیشرفته Roborock یا Dreame، حسگر LiDAR با چرخش ۳۶۰ درجه محیط را اسکن میکند و یک نقشه دقیق از فضا میسازد. در همین زمان، دوربینهای جلو نیز تصاویر اشیای روی زمین مانند کابلها یا کفشها را ثبت میکنند. این دادهها به الگوریتمهای پردازش تصویر ارسال میشوند تا نوع مانع مشخص شود. ترکیب این اطلاعات باعث میشود دستگاه نهتنها موقعیت مانع را تشخیص دهد، بلکه بتواند نوع آن را نیز شناسایی کند و مسیر مناسبتری برای عبور یا دور زدن انتخاب کند.
پردازش دادهها و تصمیمگیری لحظهای برای تغییر مسیر
پس از جمعآوری اطلاعات محیطی، مرحله مهم پردازش دادهها آغاز میشود. در این مرحله، دادههای سنسورها، تصاویر دوربین و اطلاعات نقشهبرداری به واحد پردازشی دستگاه ارسال میشوند تا تحلیل شوند. الگوریتمهای یادگیری ماشین و بینایی کامپیوتری تلاش میکنند اشیای موجود در مسیر حرکت را شناسایی کنند و فاصله دقیق آنها را محاسبه کنند. این فرآیند بخش اصلی تشخیص موانع در جارو رباتیک با هوش مصنوعی محسوب میشود زیرا دستگاه باید در کسری از ثانیه تصمیم بگیرد که آیا از کنار مانع عبور کند، مسیر خود را تغییر دهد یا منطقهای را بهطور موقت از نقشه نظافت حذف کند.
در بسیاری از جاروهای رباتیک پیشرفته، این تحلیل بهصورت کاملاً بلادرنگ انجام میشود. بهعنوان مثال، برخی مدلهای iRobot و Roborock از پردازندههای اختصاصی برای تحلیل سریع دادههای محیطی استفاده میکنند تا دستگاه بتواند در لحظه مسیر حرکت خود را اصلاح کند. اگر جارو در حین حرکت یک مانع جدید مانند اسباببازی یا کابل را شناسایی کند، الگوریتم ناوبری بلافاصله مسیر جایگزین را محاسبه میکند. این توانایی در تصمیمگیری سریع نهتنها از برخورد با اشیا جلوگیری میکند، بلکه باعث میشود فرآیند نظافت با کمترین توقف و بیشترین کارایی انجام شود.
فناوری تشخیص موانع با AI در جارو رباتیک
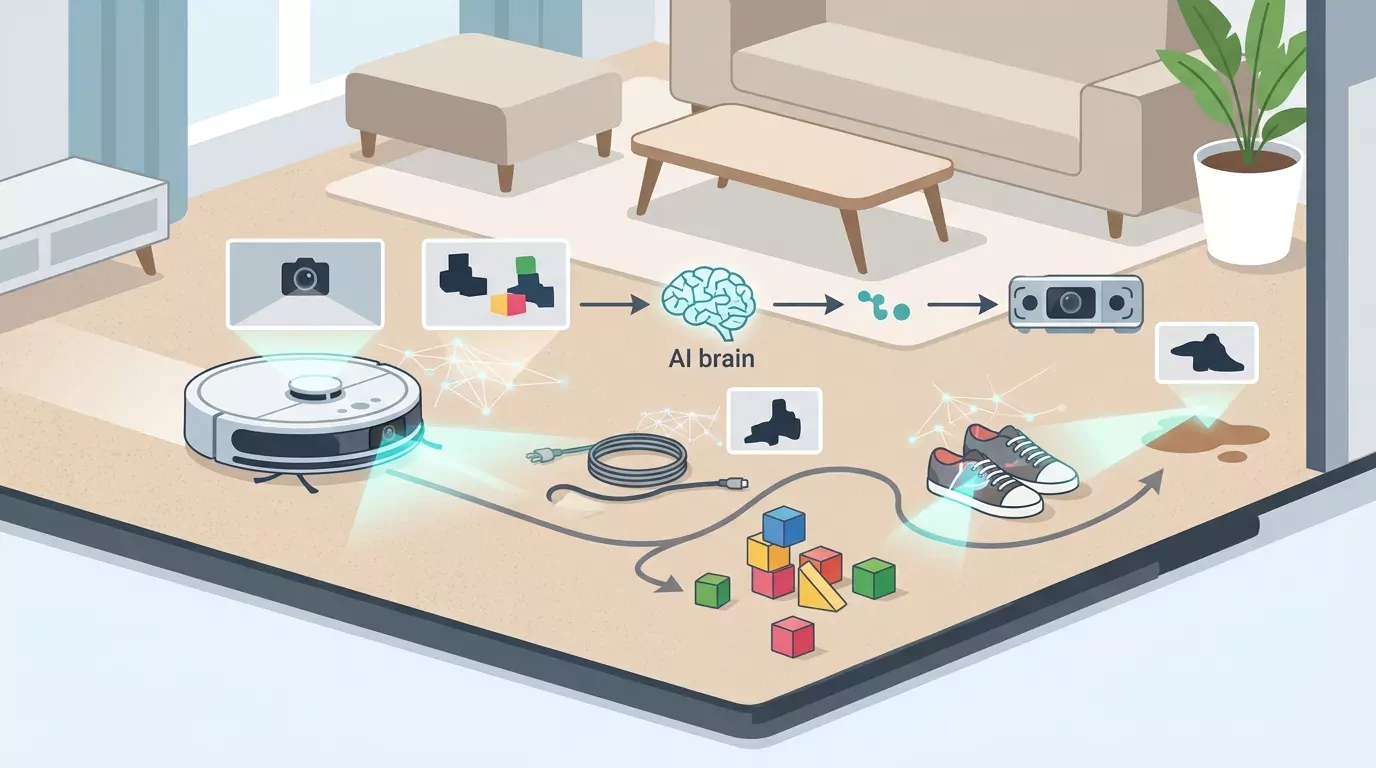
با پیشرفت پردازش تصویر و الگوریتمهای یادگیری عمیق، جاروهای رباتیک از دستگاههایی با حرکت ساده به سیستمهایی تبدیل شدهاند که میتوانند محیط خانه را تحلیل و تفسیر کنند. در نسلهای جدید، دوربینها و حسگرهای مختلف تنها وظیفه جمعآوری داده را دارند و بخش اصلی کار توسط الگوریتمهای هوش مصنوعی انجام میشود. در واقع فناوری تشخیص موانع با AI در جارو رباتیک این امکان را فراهم میکند که دستگاه نهتنها وجود مانع را تشخیص دهد، بلکه نوع آن را نیز شناسایی کند. این ویژگی باعث میشود جارو رباتیک بتواند بین اشیای مختلف مانند کابل برق، اسباببازی کودکان یا کفشهای روی زمین تفاوت قائل شود و رفتار متفاوتی برای هرکدام در نظر بگیرد.
در این فناوری، تصاویر و دادههای محیطی توسط مدلهای بینایی کامپیوتری تحلیل میشوند و اشیای مختلف بر اساس الگوهای از پیش آموزشدیده شناسایی میشوند. برای مثال، سیستم میتواند شکل باریک و کشیده یک کابل را از ساختار حجیم یک کفش تشخیص دهد و بر اساس آن مسیر حرکت را اصلاح کند. برخی از مدلهای پیشرفته حتی قادرند فضولات حیوانات خانگی را نیز شناسایی کنند تا از تماس برس یا مکنده با آن جلوگیری شود. این سطح از تحلیل محیطی باعث میشود جارو رباتیک بتواند در خانههای شلوغ و دارای موانع متنوع، نظافت را با دقت و ایمنی بیشتری انجام دهد.
نقش بینایی ماشین در شناسایی اشیاء روی زمین
بینایی ماشین یکی از مهمترین فناوریهایی است که امکان شناسایی دقیق اشیای روی زمین را برای جاروهای رباتیک فراهم میکند. در این سیستم، دوربینهای نصبشده در قسمت جلوی دستگاه تصاویر پیوستهای از محیط ثبت میکنند و این تصاویر توسط الگوریتمهای پردازش تصویر تحلیل میشوند. در این فرآیند، دستگاه بهدنبال الگوهای بصری خاصی میگردد که نشاندهنده وجود مانع هستند. این قابلیت بخش مهمی از تشخیص موانع در جارو رباتیک با هوش مصنوعی محسوب میشود زیرا دستگاه میتواند اشیای مختلف را از نظر شکل، رنگ و بافت تشخیص دهد.
برای مثال، کابلهای برق معمولاً بهصورت خطوط باریک و انعطافپذیر روی زمین قرار دارند، در حالی که اسباببازیها اشکال نامنظم و رنگهای متنوعی دارند. الگوریتمهای بینایی ماشین با استفاده از شبکههای عصبی آموزشدیده میتوانند این تفاوتها را تشخیص دهند و مانع را طبقهبندی کنند. پس از شناسایی، موقعیت مانع به سیستم ناوبری ارسال میشود تا مسیر حرکت دستگاه اصلاح شود. این فرآیند به جارو رباتیک کمک میکند بدون برخورد مستقیم با اشیا، از کنار آنها عبور کند و پوشش نظافت در محیط حفظ شود.
استفاده از یادگیری ماشین برای تشخیص موانع پیچیده
در کنار بینایی ماشین، الگوریتمهای یادگیری ماشین نقش مهمی در تحلیل دادههای محیطی و تشخیص موانع پیچیده دارند. این الگوریتمها با استفاده از مجموعه بزرگی از تصاویر و دادههای آموزشی، الگوهای مربوط به اشیای مختلف را یاد میگیرند. به همین دلیل جاروهای رباتیک مدرن میتوانند موانعی را تشخیص دهند که در گذشته برای دستگاههای ساده قابل شناسایی نبودند. در اینجا مفهوم تشخیص موانع در جارو رباتیک از یک قابلیت ساده فاصلهسنجی به یک فرآیند هوشمند تبدیل میشود که شامل طبقهبندی اشیا و پیشبینی مسیر حرکت است.
برای نمونه، برخی مدلهای پیشرفته قادرند فضولات حیوانات خانگی را از سایر اشیای روی زمین تشخیص دهند و بهطور خودکار از آنها فاصله بگیرند. این قابلیت نتیجه آموزش الگوریتمها با هزاران تصویر مختلف از محیطهای واقعی است. همچنین این سیستمها با دریافت بهروزرسانی نرمافزاری میتوانند دقت خود را به مرور زمان افزایش دهند و الگوهای جدیدی از موانع را یاد بگیرند. چنین رویکردی باعث میشود جارو رباتیک با گذشت زمان عملکرد هوشمندتری پیدا کند و در محیطهای متنوع خانگی سازگاری بیشتری داشته باشد.
انواع فناوریهای تشخیص مانع در جارو رباتیک
جاروهای رباتیک برای تشخیص موانع از فناوریهای مختلفی استفاده میکنند که هرکدام مزایا، محدودیتها و سطح دقت متفاوتی دارند. برخی مدلها بیشتر به سنسورهای فاصله متکی هستند، در حالیکه مدلهای پیشرفته از ترکیب چندین فناوری مانند LiDAR، دوربینهای تصویری و الگوریتمهای تحلیل محیط استفاده میکنند. هدف اصلی همه این فناوریها افزایش دقت در حرکت، جلوگیری از برخورد با اشیا و بهبود پوشش نظافت است. در واقع تشخیص موانع در جارو رباتیک نتیجه همکاری چندین فناوری سختافزاری و نرمافزاری است که به دستگاه کمک میکنند محیط خانه را بهصورت پویا درک کند.
تفاوت میان این فناوریها معمولاً در نوع دادهای است که از محیط جمعآوری میکنند و نحوه تحلیل آن دادهها. برخی سیستمها بیشتر بر اندازهگیری فاصله و نقشهبرداری محیط تمرکز دارند، در حالیکه برخی دیگر از تحلیل تصویر برای شناسایی نوع اشیا استفاده میکنند. به همین دلیل در جاروهای رباتیک پیشرفته معمولاً ترکیبی از این فناوریها استفاده میشود تا نقاط ضعف هر روش پوشش داده شود. در ادامه، مهمترین فناوریهای مورد استفاده در این حوزه و تفاوت عملکرد آنها بررسی میشود.
سیستمهای مبتنی بر LiDAR و نقشهبرداری محیط
فناوری LiDAR یکی از دقیقترین روشها برای درک ساختار محیط در جاروهای رباتیک محسوب میشود. در این سیستم، یک ماژول لیزری با چرخش مداوم اطراف دستگاه، فاصله تا اشیای مختلف را اندازهگیری میکند و یک نقشه دقیق از محیط ایجاد میکند. این نقشه به الگوریتمهای ناوبری کمک میکند تا موقعیت موانع، دیوارها و مسیرهای قابلحرکت را مشخص کنند. استفاده از LiDAR یکی از پایههای مهم سیستم تشخیص مانع در جارو رباتیک در مدلهای پیشرفته است زیرا امکان نقشهبرداری دقیق و حرکت ساختاریافته در محیط را فراهم میکند.
با وجود دقت بالا، LiDAR معمولاً نمیتواند نوع مانع را تشخیص دهد و بیشتر بر موقعیت و فاصله تمرکز دارد. به همین دلیل این فناوری در تشخیص اشیای کوچک یا باریک مانند کابلها محدودیت دارد. مزیت اصلی آن عملکرد پایدار در شرایط نوری مختلف و دقت بالا در نقشهبرداری محیط است. بسیاری از برندهای مطرح مانند Roborock و Dreame از LiDAR برای ساخت نقشههای چندطبقه و مسیرهای نظافت بهینه استفاده میکنند، اما در کنار آن از دوربین یا الگوریتمهای هوشمند نیز برای تکمیل فرآیند تشخیص مانع بهره میبرند.
فناوری دوربین RGB و تشخیص اشیاء
برخلاف LiDAR که بیشتر بر فاصله و موقعیت تمرکز دارد، دوربینهای RGB امکان تحلیل بصری محیط را فراهم میکنند. در این سیستم، تصاویر ثبتشده توسط دوربین به الگوریتمهای پردازش تصویر ارسال میشوند تا اشیای مختلف شناسایی شوند. این قابلیت به جارو رباتیک اجازه میدهد اشیایی مانند کفش، اسباببازی، کابل یا سایر موانع کوچک را تشخیص دهد و رفتار متفاوتی برای هرکدام در نظر بگیرد. چنین رویکردی یکی از عناصر کلیدی در فناوری تشخیص موانع با AI در جارو رباتیک محسوب میشود زیرا هوش مصنوعی میتواند اشیا را طبقهبندی کرده و تصمیم دقیقتری برای حرکت دستگاه بگیرد.
با این حال، عملکرد دوربینها تا حدی به شرایط نور محیط وابسته است. در محیطهای بسیار تاریک یا دارای انعکاس شدید نور، دقت تشخیص تصویر ممکن است کاهش یابد. به همین دلیل بسیاری از تولیدکنندگان از ترکیب دوربین با سنسورهای دیگر استفاده میکنند تا سیستم تشخیص مانع پایدارتر شود. مزیت اصلی این فناوری توانایی تشخیص نوع مانع است؛ قابلیتی که به دستگاه کمک میکند از اشیای حساس یا مشکلساز مانند فضولات حیوانات خانگی فاصله بگیرد.
سنسورهای مادون قرمز و تشخیص فاصله
سنسورهای مادون قرمز از قدیمیترین و در عین حال پرکاربردترین ابزارها برای تشخیص فاصله در جاروهای رباتیک هستند. این سنسورها با ارسال پرتو مادون قرمز و اندازهگیری بازتاب آن، فاصله تا اشیا را محاسبه میکنند. چنین سیستمی به دستگاه کمک میکند قبل از برخورد فیزیکی با مانع، فاصله آن را تشخیص دهد و مسیر حرکت را اصلاح کند. در بسیاری از مدلهای اقتصادی، این فناوری بخش اصلی تشخیص موانع در جارو رباتیک با هوش مصنوعی را تشکیل نمیدهد بلکه بهعنوان یک لایه کمکی برای جلوگیری از برخورد استفاده میشود.
با وجود سادگی، سنسورهای مادون قرمز محدودیتهایی نیز دارند. این سنسورها معمولاً قادر به تشخیص دقیق اشیای بسیار کوچک یا شفاف نیستند و اطلاعاتی درباره نوع مانع ارائه نمیدهند. با این حال، سرعت بالا در اندازهگیری فاصله و مصرف انرژی کم باعث شده است همچنان در بسیاری از جاروهای رباتیک استفاده شوند. در مدلهای پیشرفته، این سنسورها در کنار LiDAR و دوربینهای تصویری قرار میگیرند تا دستگاه بتواند هم فاصله موانع را دقیق تشخیص دهد و هم نوع آنها را تحلیل کند.
تفاوت جاروهای رباتیک معمولی و مدلهای مجهز به هوش مصنوعی
در نگاه اول ممکن است بسیاری از جاروهای رباتیک عملکرد مشابهی داشته باشند، اما تفاوت اصلی آنها در نحوه درک محیط و مدیریت موانع مشخص میشود. مدلهای ساده معمولاً بر اساس الگوهای حرکتی تصادفی یا برخورد فیزیکی با اشیا حرکت میکنند، در حالیکه مدلهای پیشرفته از الگوریتمهای تحلیل محیط و پردازش داده برای انتخاب مسیر استفاده میکنند. همین تفاوت باعث میشود عملکرد دستگاه در خانههای واقعی کاملاً متفاوت باشد. در واقع وجود فناوری تشخیص موانع با AI در جارو رباتیک باعث میشود دستگاه بتواند پیش از برخورد با اشیا آنها را شناسایی کرده و مسیر مناسبتری برای حرکت انتخاب کند.
این تفاوت در محیطهای خانگی که دارای چیدمان متنوع، مبلمان زیاد یا اشیای پراکنده هستند بیشتر به چشم میآید. در چنین شرایطی، جاروهای هوشمند میتوانند مسیرهای تمیزکاری را بر اساس نقشه محیط برنامهریزی کنند و از مناطق پرمانع با دقت عبور کنند. در مقابل، مدلهای ساده ممکن است بارها به یک نقطه برخورد کنند یا بخشی از خانه را بهطور کامل پوشش ندهند. همین موضوع باعث شده است که در نسلهای جدید جارو رباتیک، تمرکز اصلی بر ترکیب نقشهبرداری محیط، تحلیل دادههای سنسوری و تصمیمگیری هوشمند باشد.
محدودیت سیستمهای برخوردی ساده
در بسیاری از جاروهای رباتیک قدیمی، تشخیص مانع بر اساس یک مکانیزم بسیار ساده انجام میشود: دستگاه حرکت میکند تا زمانی که با مانعی برخورد کند و سپس مسیر خود را تغییر میدهد. این روش که به سیستم برخوردی معروف است، به هیچ نوع تحلیل پیشرفته از محیط متکی نیست و تنها به سنسورهای فیزیکی برای تشخیص تماس با اشیا وابسته است. نبود یک سیستم تشخیص مانع در جارو رباتیک پیشرفته باعث میشود این دستگاهها در محیطهای واقعی عملکرد محدودی داشته باشند.
برای مثال، در یک خانه معمولی ممکن است کابل شارژر روی زمین قرار داشته باشد یا اسباببازی کودکان در مسیر حرکت دستگاه باشد. جاروهای ساده معمولاً قادر به تشخیص این موانع قبل از برخورد نیستند و در بسیاری از موارد در میان آنها گیر میکنند. همچنین در فضاهایی با مبلمان زیاد، دستگاه ممکن است بارها به پایه میز یا صندلی برخورد کند و زمان زیادی را برای خروج از همان محدوده صرف کند. این رفتار نهتنها کارایی نظافت را کاهش میدهد، بلکه میتواند به قطعات دستگاه نیز فشار بیشتری وارد کند.
مزیت سیستمهای هوشمند در خانههای شلوغ
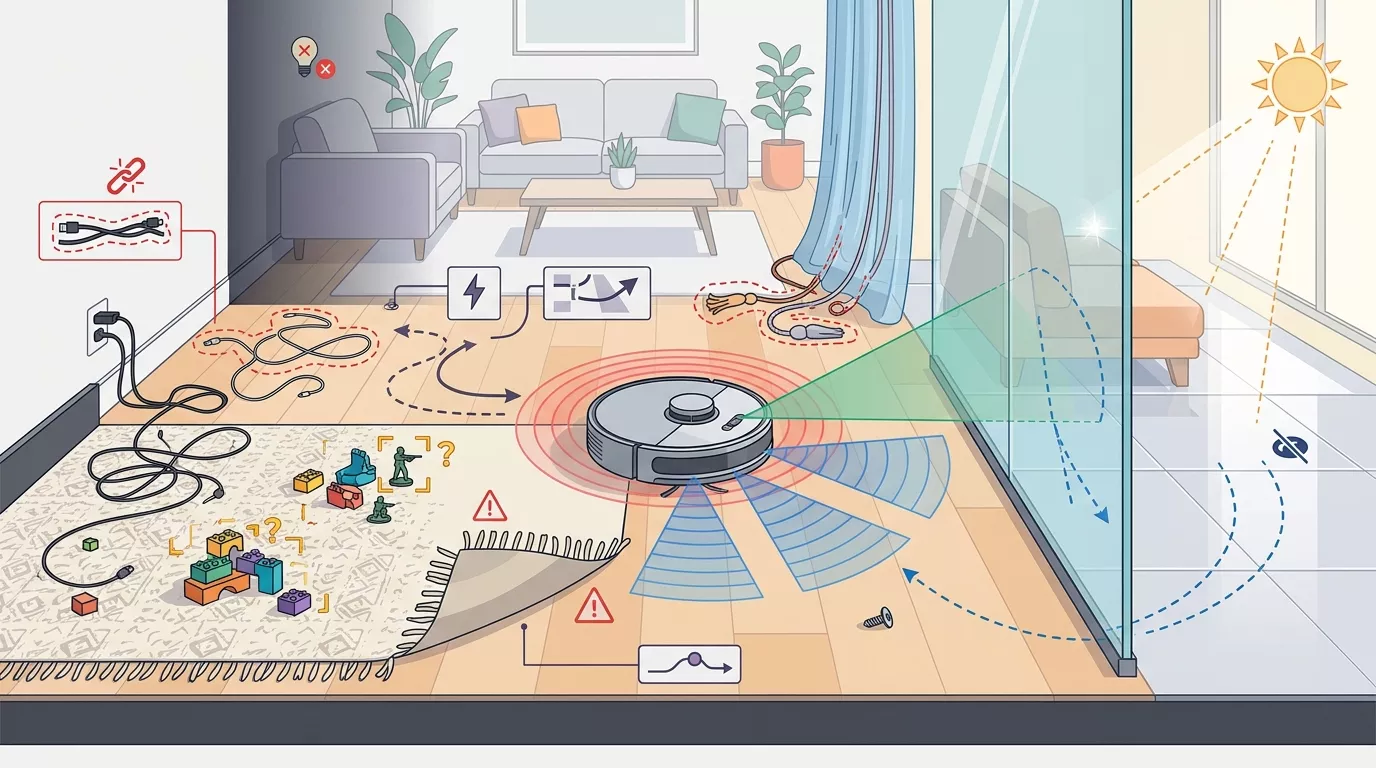
در مقابل، جاروهای رباتیک مجهز به سیستمهای هوشمند میتوانند محیط را قبل از حرکت تحلیل کنند و موانع را بهصورت دقیق شناسایی کنند. این قابلیت بهویژه در خانههایی که وسایل مختلفی روی زمین قرار دارند اهمیت زیادی دارد. در چنین محیطهایی، دستگاه باید بتواند کابلها، کفشها یا اشیای کوچک را تشخیص دهد و مسیر حرکت خود را بهصورت پویا تنظیم کند. استفاده از الگوریتمهای تحلیل تصویر و دادههای سنسوری باعث شده است که تشخیص موانع در جارو رباتیک در مدلهای پیشرفته بسیار دقیقتر انجام شود.
در یک سناریوی واقعی، تصور کنید در اتاق نشیمن چند اسباببازی کودک روی زمین قرار دارد و یک کابل شارژ نیز کنار مبل افتاده است. یک جارو رباتیک هوشمند میتواند این اشیا را در نقشه محیط ثبت کند و از کنار آنها عبور کند، بدون اینکه برس یا چرخهای دستگاه درگیر شوند. همچنین اگر در حین نظافت مانع جدیدی در مسیر قرار گیرد، سیستم ناوبری میتواند مسیر جایگزین را در لحظه محاسبه کند. چنین قابلیتی باعث میشود دستگاه حتی در خانههای شلوغ نیز بتواند با حداقل توقف و بیشترین کارایی عملیات نظافت را انجام دهد.

چالشها و محدودیتهای تشخیص موانع در جارو رباتیک
با وجود پیشرفتهای چشمگیر در حوزه ناوبری و پردازش تصویر، فناوریهای مورد استفاده در جاروهای رباتیک هنوز با محدودیتهایی روبهرو هستند. محیط خانه برخلاف محیطهای کنترلشده صنعتی بسیار متغیر است و وجود اشیای کوچک، سطوح مختلف کف و تغییرات نور میتواند دقت سیستمهای تشخیص را تحت تأثیر قرار دهد. به همین دلیل حتی در مدلهای پیشرفته نیز گاهی خطا در شناسایی موانع رخ میدهد. در چنین شرایطی عملکرد تشخیص موانع در جارو رباتیک به میزان دقت سنسورها، کیفیت الگوریتمهای پردازش داده و نحوه ترکیب اطلاعات محیطی وابسته است.
بسیاری از تولیدکنندگان تلاش میکنند با ترکیب چند فناوری مختلف مانند LiDAR، دوربینهای تصویری و سنسورهای فاصله این محدودیتها را کاهش دهند. همچنین استفاده از الگوریتمهای یادگیری ماشین و بهروزرسانیهای نرمافزاری به دستگاه کمک میکند الگوهای جدیدی از موانع را شناسایی کند و دقت عملکرد خود را به مرور زمان افزایش دهد. با این حال، برخی شرایط محیطی همچنان میتوانند برای سیستمهای تشخیص مانع چالشبرانگیز باشند و نیاز به پیشرفت بیشتر در طراحی سختافزار و الگوریتمهای هوشمند دارند.
موانعی که هنوز برای جارو رباتیک چالش محسوب میشوند
برخی موانع در محیطهای خانگی بهدلیل اندازه کوچک یا شکل خاص خود هنوز برای جاروهای رباتیک چالش محسوب میشوند. اشیایی مانند کابلهای نازک، بند پرده، سیم هدفون یا قطعات کوچک اسباببازی اغلب در سطح زمین قرار دارند و تشخیص دقیق آنها برای بسیاری از سیستمها دشوار است. حتی در مدلهای پیشرفته نیز گاهی این اشیا بهعنوان بخشی از سطح زمین تفسیر میشوند. در چنین شرایطی کارایی سیستم تشخیص مانع در جارو رباتیک تا حد زیادی به کیفیت دوربینها، دقت سنسورها و توان پردازشی الگوریتمهای تحلیل تصویر بستگی دارد.
چالش دیگر مربوط به اشیایی است که شکل یا جنس غیرمعمول دارند. برای مثال، برخی اجسام شفاف یا بسیار براق ممکن است توسط سنسورهای فاصله بهدرستی تشخیص داده نشوند. همچنین اشیایی که ارتفاع بسیار کمی دارند، مانند لبههای نازک فرش یا برخی وسایل کوچک، ممکن است از دید برخی حسگرها پنهان بمانند. به همین دلیل در نسلهای جدید جاروهای رباتیک تلاش شده است با استفاده از ترکیب چند نوع حسگر و تحلیل دادههای چندمنبعی، احتمال خطا در شناسایی این موانع کاهش یابد.
تاثیر نور، بافت زمین و اشیای کوچک در دقت تشخیص
شرایط محیطی یکی از عوامل مهم در عملکرد سیستمهای تشخیص مانع است. برای مثال، نور محیط میتواند تاثیر قابلتوجهی بر دقت دوربینهای تصویربرداری داشته باشد. در محیطهای بسیار تاریک یا در شرایطی که نور شدید باعث ایجاد بازتاب روی سطوح براق میشود، الگوریتمهای پردازش تصویر ممکن است با خطا مواجه شوند. در چنین شرایطی عملکرد تشخیص موانع در جارو رباتیک با هوش مصنوعی تا حد زیادی به توانایی سیستم در ترکیب دادههای سنسورها و تحلیل هوشمند محیط بستگی دارد.
علاوه بر نور، نوع سطح زمین نیز میتواند بر دقت تشخیص تاثیر بگذارد. کفپوشهای بسیار تیره، فرشهای با طرح پیچیده یا سطوح براق گاهی باعث ایجاد نویز در دادههای سنسورها میشوند. همچنین اشیای بسیار کوچک که ارتفاع کمی از سطح زمین دارند ممکن است در برخی زاویهها توسط دوربین یا سنسور فاصله بهخوبی دیده نشوند. به همین دلیل بسیاری از تولیدکنندگان در مدلهای جدید از الگوریتمهای پیشرفتهتر و دادههای آموزشی گسترده استفاده میکنند تا دستگاه بتواند در شرایط متنوع محیطی عملکرد دقیقتری داشته باشد.
عملکرد برند شیائومی در فناوری تشخیص مانع
شیائومی در سالهای اخیر به یکی از بازیگران جدی بازار جاروهای رباتیک تبدیل شده است و بخش مهمی از این موفقیت به توسعه سیستمهای ناوبری و تشخیص مانع برمیگردد. این برند با ترکیب فناوریهایی مانند LiDAR، سنسورهای فاصله و الگوریتمهای هوش مصنوعی تلاش کرده است دقت حرکت و تشخیص اشیا را در محیطهای خانگی افزایش دهد. در بسیاری از مدلهای جدید، سیستم ناوبری دستگاه قادر است نقشه دقیقی از خانه ایجاد کند و در حین حرکت، موانع احتمالی را شناسایی کرده و مسیر خود را اصلاح کند. این رویکرد باعث شده است که عملکرد فناوری تشخیص موانع با AI در جارو رباتیک در محصولات جدید شیائومی نسبت به نسلهای قدیمیتر پیشرفت قابل توجهی داشته باشد.
یکی از ویژگیهای قابل توجه در جاروهای رباتیک این برند، استفاده از تحلیل دادههای چندسنسوری است. دستگاه اطلاعات بهدستآمده از دوربین، سنسورهای فاصله و سیستم نقشهبرداری را با یکدیگر ترکیب میکند تا درک دقیقتری از محیط داشته باشد. این موضوع به جارو کمک میکند تا هنگام حرکت در فضاهای شلوغ یا نزدیک مبلمان، مسیر خود را با دقت بیشتری تنظیم کند. اگر قصد خرید جارو رباتیک شیائومی دارید، مشاهده مدلهای متنوع در PB360 میتواند دید بهتری از امکانات و فناوریهای موجود در این دستگاهها ارائه دهد.
بررسی جارو رباتیک Xiaomi Robot Vacuum 5 Pro
جارو برقی رباتیک شیائومی مدل Xiaomi Robot Vacuum 5 Pro یکی از نمونههای جدید جاروهای رباتیک این برند است که تمرکز ویژهای بر سیستمهای ناوبری هوشمند دارد. در این دستگاه از ترکیب LiDAR برای نقشهبرداری محیط و الگوریتمهای پردازش تصویر برای شناسایی اشیا استفاده شده است. این ترکیب باعث میشود جارو بتواند ساختار اتاقها، موقعیت مبلمان و مسیرهای قابل حرکت را با دقت بالا تشخیص دهد. وجود یک سیستم تشخیص مانع در جارو رباتیک پیشرفته در این مدل به دستگاه اجازه میدهد قبل از برخورد با اشیا مسیر خود را اصلاح کند.
از نظر عملکرد در محیط واقعی، این جارو میتواند اشیای رایجی مانند کفش، پایه صندلی یا وسایل کوچک روی زمین را شناسایی کرده و از کنار آنها عبور کند. همچنین نقشهبرداری چندطبقه و ذخیره نقشههای مختلف باعث میشود دستگاه بتواند در خانههای بزرگ نیز بهصورت بهینه حرکت کند. ترکیب این قابلیتها با قدرت مکش بالا و مدیریت هوشمند مسیر باعث شده است Xiaomi Robot Vacuum 5 Pro در میان مدلهای جدید بازار بهعنوان یکی از گزینههای قابل توجه در زمینه ناوبری و تشخیص موانع شناخته شود.

آینده فناوری تشخیص موانع در جارو رباتیک
فناوری جاروهای رباتیک در سالهای اخیر با سرعت قابل توجهی پیشرفت کرده است، اما مسیر توسعه آن همچنان ادامه دارد. تمرکز نسلهای آینده این دستگاهها بر افزایش دقت درک محیط، کاهش خطا در تشخیص موانع و تصمیمگیری هوشمندتر در مسیر حرکت خواهد بود. تولیدکنندگان تلاش میکنند با استفاده از ترکیب سنسورهای پیشرفته، پردازش دادههای پیچیده و الگوریتمهای یادگیری عمیق، سیستمهای ناوبری را به سطحی برسانند که دستگاه بتواند محیط خانه را تقریباً مانند یک انسان تحلیل کند. در این مسیر، توسعه فناوری تشخیص موانع با AI در جارو رباتیک نقش کلیدی در تبدیل جاروهای رباتیک به دستگاههایی کاملاً خودکار و هوشمند خواهد داشت.
در آینده، انتظار میرود این دستگاهها نهتنها موانع را تشخیص دهند، بلکه بتوانند نوع آنها را نیز تحلیل کنند و بر اساس آن تصمیمهای متفاوتی بگیرند. برای مثال، دستگاه ممکن است تشخیص دهد یک شیء موقت است و بعداً مسیر را دوباره بررسی کند، یا متوجه شود یک مانع دائمی مانند پایه میز است و آن را در نقشه دائمی محیط ثبت کند. چنین سطحی از درک محیط باعث میشود جاروهای رباتیک بتوانند با کارایی بالاتر، مصرف انرژی کمتر و مسیرهای تمیزکاری بهینهتر در خانههای هوشمند آینده فعالیت کنند.
ترکیب هوش مصنوعی، نقشهبرداری سهبعدی و تحلیل محیط
یکی از مهمترین روندهای آینده در این صنعت، حرکت به سمت نقشهبرداری سهبعدی محیط است. در حال حاضر بسیاری از جاروهای رباتیک از نقشههای دوبعدی استفاده میکنند، اما در نسلهای آینده انتظار میرود سیستمهای پیشرفته بتوانند ساختار سهبعدی فضا را نیز تحلیل کنند. این فناوری با استفاده از ترکیب LiDAR پیشرفته، دوربینهای عمقسنج و الگوریتمهای بینایی ماشین میتواند اطلاعات دقیقتری از ارتفاع اشیا، فاصله آنها و شکل محیط ایجاد کند. چنین پیشرفتی دقت تشخیص موانع در جارو رباتیک را به شکل قابل توجهی افزایش خواهد داد.
نقشهبرداری سهبعدی همچنین به دستگاه کمک میکند تا رفتار بهتری در برابر موانع پیچیده داشته باشد. برای مثال، جارو میتواند تشخیص دهد که آیا فضای زیر یک مبل برای عبور مناسب است یا خیر، یا اینکه ارتفاع یک شیء مانع حرکت دستگاه خواهد شد. ترکیب این دادهها با تحلیل هوشمند محیط باعث میشود جاروهای رباتیک در آینده بتوانند مسیرهای تمیزکاری بسیار دقیقتری طراحی کنند و تعامل بهتری با ساختار واقعی خانه داشته باشند.
نسل بعدی جاروهای رباتیک با تصمیمگیری پیشبینانه
نسل بعدی جاروهای رباتیک احتمالاً از سیستمهای تصمیمگیری پیشبینانه استفاده خواهند کرد؛ به این معنا که دستگاه تنها به واکنش نسبت به موانع اکتفا نمیکند، بلکه میتواند شرایط آینده مسیر را نیز پیشبینی کند. این قابلیت با استفاده از مدلهای یادگیری ماشین و تحلیل دادههای رفتاری محیط امکانپذیر میشود. در چنین سیستمی، دستگاه میتواند الگوهای حرکت در خانه را یاد بگیرد و بر اساس آن بهترین زمان و مسیر برای نظافت را انتخاب کند. وجود یک سیستم تشخیص مانع در جارو رباتیک پیشرفته در کنار این الگوریتمها باعث میشود دستگاه تصمیمهای دقیقتری در زمان حرکت بگیرد.
برای مثال، اگر جارو تشخیص دهد که در ساعات خاصی از روز اشیای بیشتری روی زمین قرار میگیرند، میتواند زمان نظافت را تغییر دهد یا مسیر حرکت خود را بهگونهای تنظیم کند که از برخورد با آنها جلوگیری شود. همچنین در خانههای مجهز به اینترنت اشیا، این دستگاهها میتوانند با سایر تجهیزات هوشمند ارتباط برقرار کنند و اطلاعات محیطی بیشتری دریافت کنند. چنین سطحی از هماهنگی و تحلیل دادهها نشان میدهد که آینده جاروهای رباتیک تنها به نظافت خودکار محدود نخواهد شد، بلکه به بخشی از اکوسیستم خانههای هوشمند تبدیل خواهد شد.

اگر قصد دارید یک جارو رباتیک هوشمند با فناوری تشخیص موانع پیشرفته تهیه کنید، انتخاب یک فروشگاه تخصصی اهمیت زیادی دارد. در PB360 مجموعهای از جدیدترین مدلهای جارو رباتیک از برندهای معتبر دنیا ارائه شده است تا بتوانید بر اساس نیاز خانه، بودجه و امکانات موردنظر بهترین گزینه را انتخاب کنید.
در اینجا میتوانید مشخصات فنی مدلهای مختلف را بهصورت کامل بررسی کنید، تفاوت فناوریها را مقایسه کنید و با اطمینان بیشتری خرید خود را انجام دهید. اگر به دنبال تجربهای سادهتر و هوشمندتر در نظافت خانه هستید، پیشنهاد میکنیم محصولات جارو رباتیک موجود در PB360 را مشاهده کنید و مناسبترین مدل را برای خانه خود انتخاب کنید.